
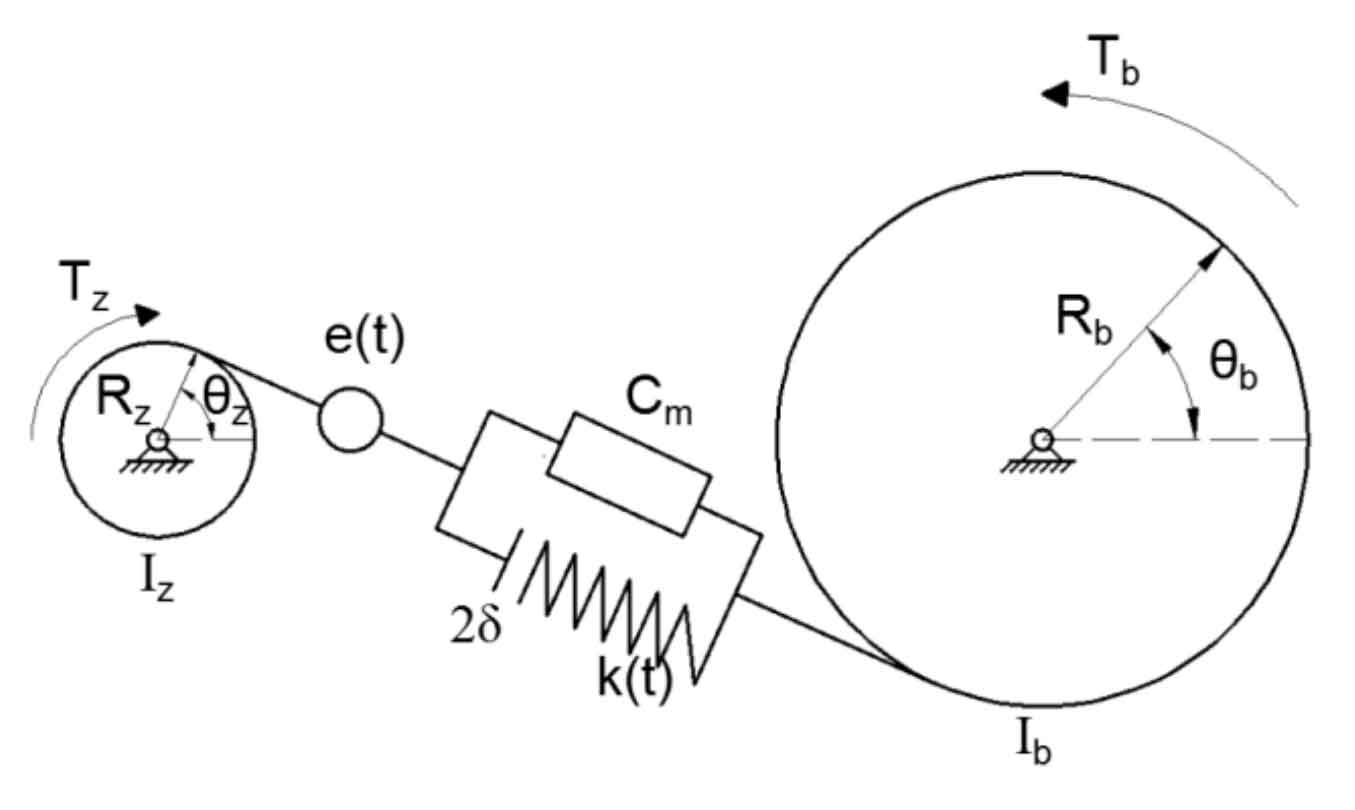
Under the ideal condition that all components in the gearbox except the helical gear are regarded as absolute rigid bodies without considering any errors, a pair of involute helical gear meshing pairs can be simplified as the nonlinear mathematical model shown in Figure 1.

In the formula, Iz and Ib are the rotational inertia of the main and driven wheels respectively; θ i(i=z,b)、 θ̇ i(i=z,b)、 θ̈ I (i=z, b) torsional vibration displacement, vibration velocity and vibration acceleration of the main and driven wheels respectively; Rz and Rb are the base circle radius of the main and driven wheels respectively; Cm is the meshing damping of the helical gear pair; E (t) is the static transmission error of the meshing helical gear pair; K (t) is the time-varying meshing stiffness of the meshing helical gear pair; F (x) is the helical gear clearance function; δ 1/2 of the backlash; Tz and Tb are the torsional moments acting on the driving and driven wheels respectively.
Wherein, the helical gear clearance function f (x) (as shown in Fig. 2) can be determined by δ The size relationship of continues to be refined. When x> δ F (x)=x- δ; When x<- δ F (x)=x+ δ; When | x | ≤ δ F (x)=0.