
The manipulator is the part that directly contacts with the target object and plays the role of clamping and pulling in the target object. The structure of a single finger is shown in Figure. The worm 1 and the worm gear 1 control the rotation of the joint 1. With the parallelogram structure and driven by the rotating finger, the grasping finger is stably closed to achieve the clamping function of the target object; The power transmitted by the worm 2 and the worm gear 2 drives the belt through the gear to realize the pulling in function of the target object. It can be seen from the transmission relationship in Figure that there is no coupling relationship between the rotation joint 1 of the finger and the rotation of the synchronous belt, which is different from the fingers of link type and tendon rope type manipulators. In the process of power transmission, the worm gear and worm are used to realize power transmission on the one hand, and the self-locking ability of the worm gear and worm on the other hand, to prevent fingers from loosening after the motor stops running, and also to prevent the target object pulled in from falling back under the action of gravity.
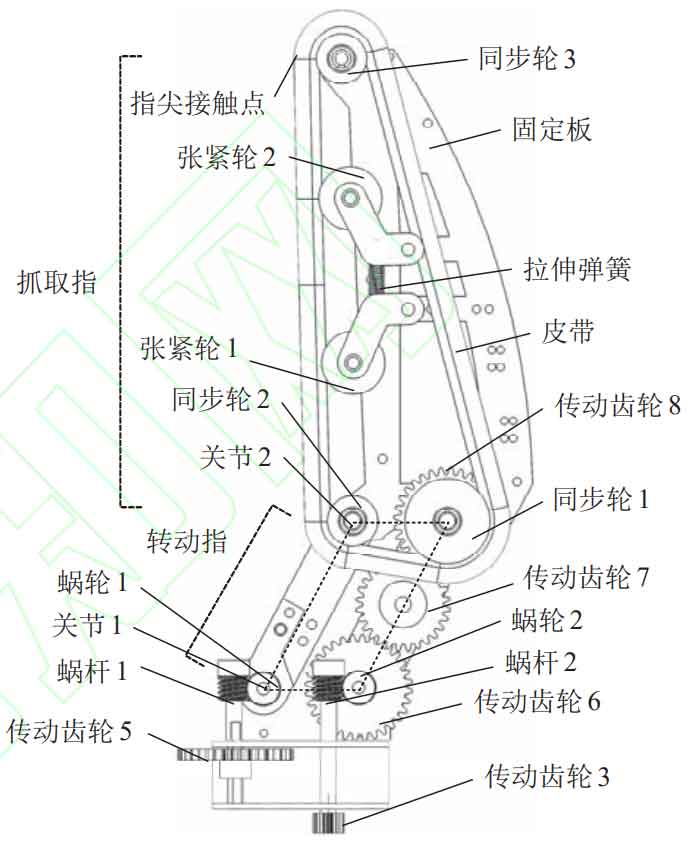
It can be seen that the load has a certain impact on the dynamic characteristics of the belt. For the finger structure of the belt pull in type, it is necessary to design a belt pre tensioning mechanism or provide sufficient support points to make the belt have sufficient tension. The proposed belt pull in manipulator has insufficient belt tension and few supporting points, which makes this kind of manipulator can only grasp small mass objects. For the finger in Figure, in order to avoid the lack of support for the target object due to insufficient belt tension during the pulling in process, a tensioning pulley 1 and a tensioning pulley 2 connected by springs are designed. These two tensioning pulleys provide two support points to ensure stable grasping and also extend the life of the belt.