
In order to verify the superiority of fuzzy entropy in the fault classification of transmission gears, based on the gear fault test-bed, the vibration signals of four common working conditions of normal gear, slight wear of tooth surface, moderate wear of tooth surface and broken tooth are measured respectively. The rotation frequency of the tested gear is fr = 23.6 Hz, the meshing frequency is FZ = 686 Hz, and the sampling frequency of the vibration signal is 16384 Hz. By replacing the defective gear, all kinds of gear faults can be simulated. Firstly, morphological Haar wavelet is introduced to denoise the original sampled signal, and then the fuzzy entropy of the denoised vibration signal is calculated. Limited to space, taking gear normal signal as an example, figure 1 shows the time domain waveform and spectrum of gear normal signal before and after morphological Haar wavelet de-noising. The gear vibration signal of each working condition is decomposed by morphological Haar wavelet, and the decomposition layer is divided into three layers. The detail signal of each layer is de-noising by soft threshold, and then the de-noising gear vibration signal of each working condition is reconstructed.
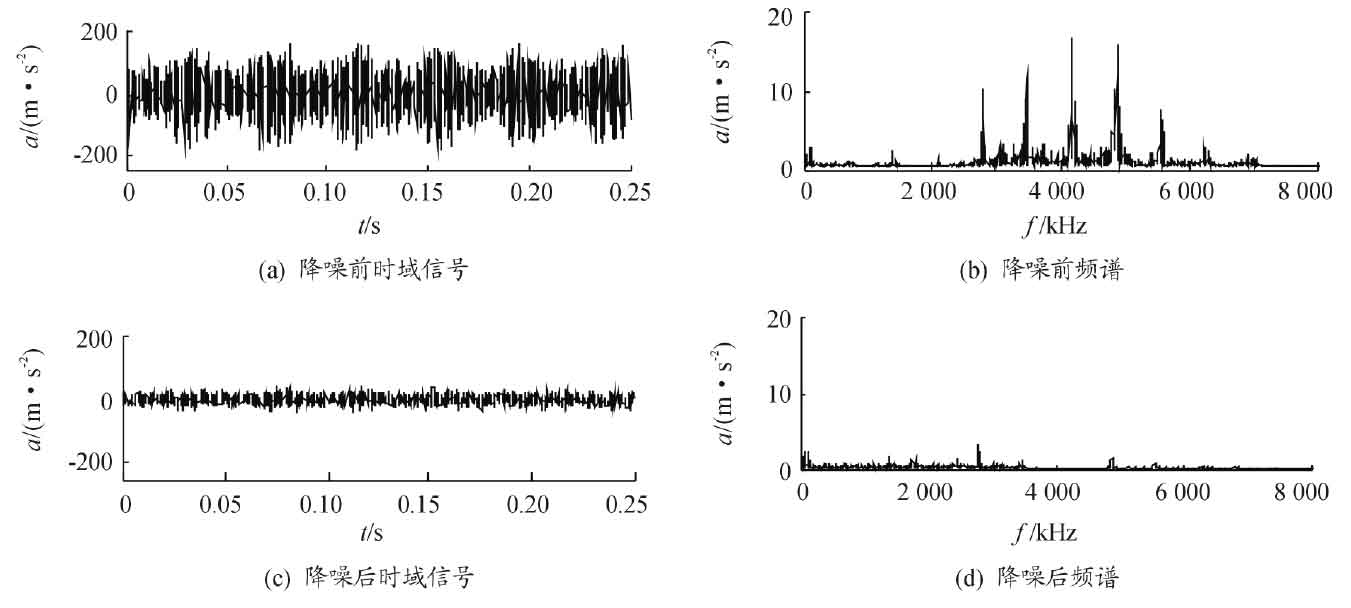
Comparing the spectrum before and after noise reduction of gear normal signal, it can be seen that the high-frequency noise contained in the original signal has been well suppressed after noise reduction of gear normal signal by morphological Haar wavelet, which is of great significance for the subsequent characteristic parameter calculation of gear vibration signal.
Fuzzy entropy is selected as the characteristic parameter of fault signal to calculate the fuzzy entropy of four different working conditions of gear. In this paper, M = 2, r = 0.2 STD are selected. For space limitation, the fuzzy entropy of 10 groups of sampling data under each condition is shown in Figure 2. “.” represents the fuzzy entropy of gear normal condition signal; “0” represents the fuzzy entropy of gear slight wear condition signal; “+” represents the fuzzy entropy of gear moderate wear condition signal; “X” represents the fuzzy entropy of gear broken condition signal (the same below).
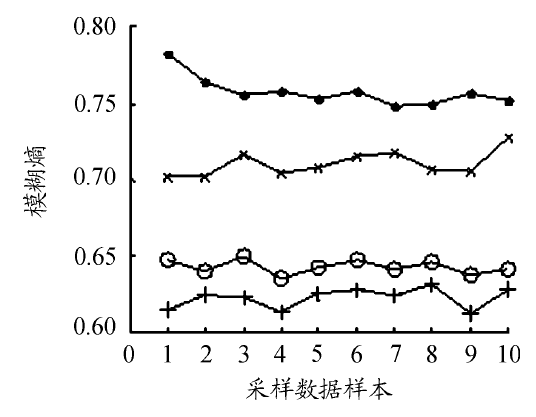
It can be seen from Figure 2 that the fuzzy entropy extracted under different fault conditions of gears presents obvious differences, and the distribution of fuzzy entropy is relatively gentle, showing better classification effect under different working conditions. It can also be seen from the figure that the fuzzy entropy value of gear normal working condition signal is the largest, which indicates that the randomness of sampling data is the largest. The slight wear of the tooth surface is the most difficult to be observed in the vibration signal monitoring, so its fault characteristics are the least obvious. Using fuzzy entropy as the characteristic parameter, the moderate wear and mild wear of the tooth surface are well distinguished in the figure. Based on the above good classification ability, fuzzy entropy can be used to distinguish the vibration signals under different fault modes.
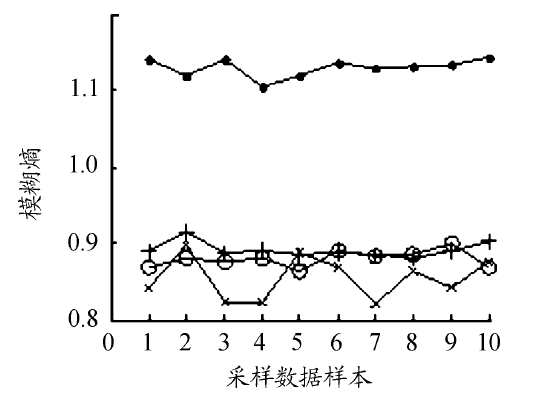
For convenience of comparison, the fuzzy entropy of the original vibration signal of the gear under the above four working conditions is shown in Fig. 3. Compared with Fig. 2 and Fig. 3, it can be seen that except the normal signal fuzzy entropy value can be clearly distinguished, the fuzzy entropy values calculated under the other three working conditions are seriously crossed, which can not effectively distinguish the fault types of gears.
Similar to the gear fault data used in this paper, the sequential morphological filter is used to denoise the gear fault signal, and the singular entropy of the denoised signal is extracted to classify and identify the gear fault. By comparing the distribution of the singular entropy of the signals under different working conditions after de-noising and the distribution of the fuzzy entropy of the signals after de-noising with morphological wavelet, it can be seen that the difference of the singular entropy of the signals under different working conditions after de-noising is small. Although the signals can also be classified, the effect is not as obvious as that of the fuzzy entropy extracted after de-noising in this paper, which also shows the effectiveness of the proposed method .