
According to the installation layout of the tooth turning tool, the imaginary generating gear and the face gear, the tooth turning coordinate system of the spiral tooth face gear is established, as shown in Figure 6. Ss (Os, xs, ys, zs), Sg (Og, xg, yg, zg), S2 (O2, x2, y2, z2) are respectively the dynamic coordinate systems that are fixedly connected with the tooth turning tool, the imaginary generating gear and the spiral tooth face gear; Sc (Oc, xc, yc, zc), Sp (Op, xp, yp, zp), Sm (Om, xm, ym, zm) are fixed coordinate systems which are respectively connected with the gear turning tool, the imaginary generating gear and the helical gear; The coordinate system Sb (Ob, xb, yb, zb) is fixed with the rack and is an auxiliary coordinate system.
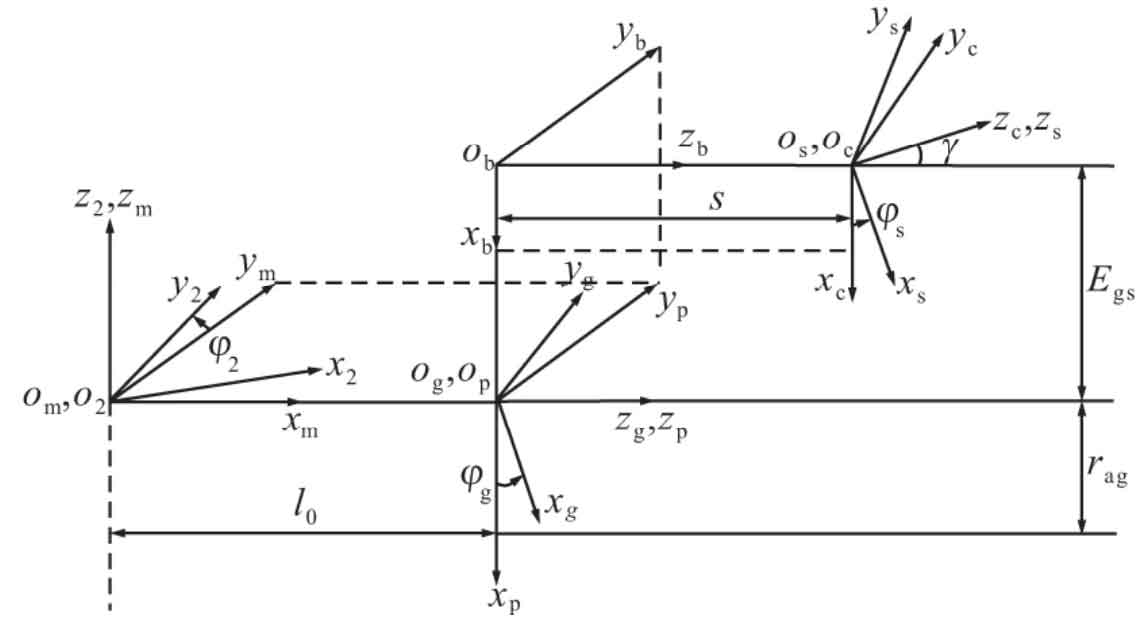
It can be seen from the figure that the coordinate transformation matrix from coordinate system Ss to coordinate system S2 is:

In the formula, M2s represents the coordinate transformation matrix from the coordinate system Ss to the coordinate system S2, and so on; φ S is the rotation angle of the gear turning tool around the shaft; S is the feed distance of the gear turning tool along the radial direction of the helical gear.
After the two-degree-of-freedom turning movement, the surface family of the cutting tool edge curve in the spiral gear coordinate system S2 can be obtained, and its equation r2k is expressed as:

According to the enveloping method, the enveloping conditions of turning tool edge shape and helical gear are:

According to the envelope condition, s can be expressed as θ S and φ The expression of s, namely:
The working tooth surface equation of spiral tooth surface gear is obtained by the simultaneous formula:

The transition tooth surface of helical gear is a curved surface formed by cutting the tooth top line of the turning tool. Therefore, in the coordinate system S2, the equation of the transition tooth surface of helical gear is:

Where, θ* S is the value of θ S value, its size is:
Where, ras is the radius of the addendum circle of the gear turning tool; Rbs is the radius of the tooth root circle of the turning tool.