
According to the mechanical model of internal gear pair and gear dynamic model, the dynamic model of internal modified gear in this paper is created, as shown in Figure 1.
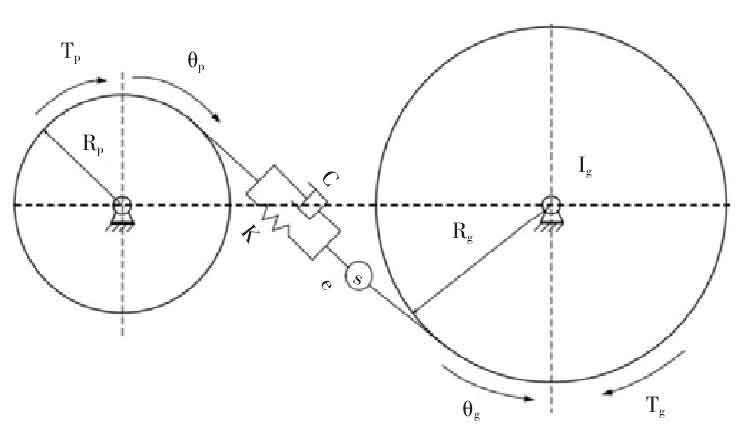
In Figure 1, K is the generalized contact stiffness; E is the gear transmission error; C damping coefficient of gear pair in contact process; I、 θ、 R. T is the moment of inertia, torsional vibration displacement, base circle radius and external moment. According to the dynamic model in Figure 1, the meshing force equation is deduced by Newton’s law

In the formula, δ Is the relative contact impact velocity; α It’s the power index.
After the dynamic model is established, the meshing force is solved by Matlab function programming, and comparative analysis is carried out. The analysis results are shown in Figure 2.

It can be seen from Figure 2 that the engagement force is between – 600 and 600 n, and the maximum engagement force appears above the fluctuation amplitude, which is 600 n. when the mechanism moves below the fluctuation amplitude, the maximum engagement force is 600 n.