
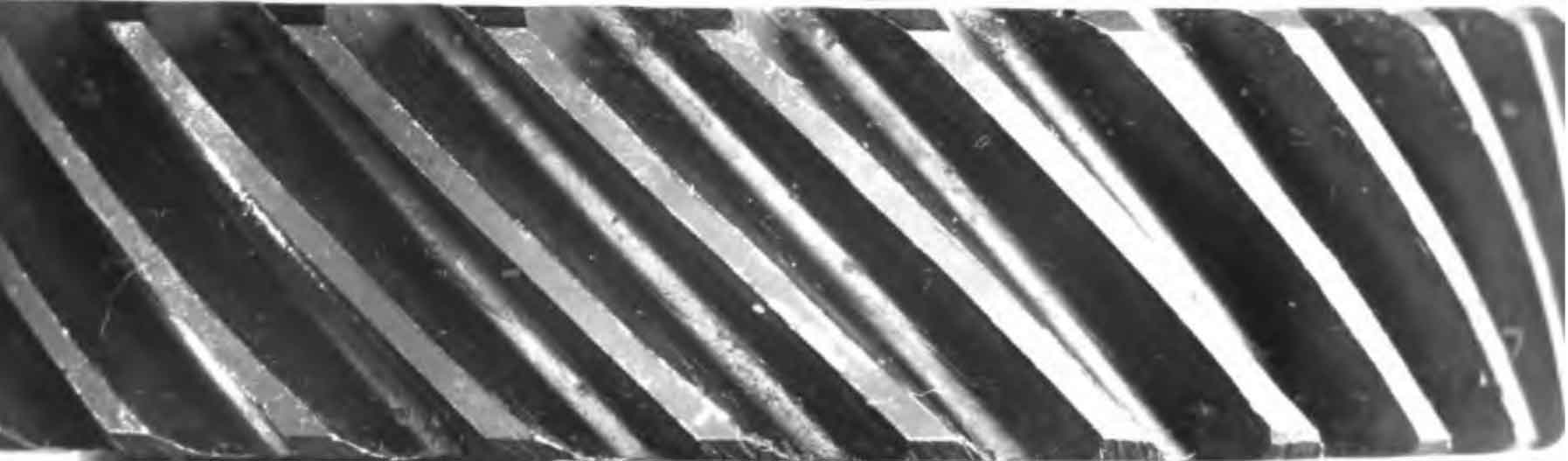
As shown in Fig. 1, due to the special tooth shape of helical gears, the brightness and contrast of the gear surface are extremely uneven. When the left-handed helical gear is illuminated by the upper light source, the left and right edges of the helical gear image are clear. The light intensity is high on the left and top, and low on the right and bottom. The right-hand helical gear is just the opposite. This makes the contrast at the center and right position of the helical gear too low, which is unfavorable for edge extraction. In order to improve the accuracy of edge detection, a strip light source is installed on the side camera to compensate for illumination.
The results of some edge extraction algorithms are shown in Fig. 2.
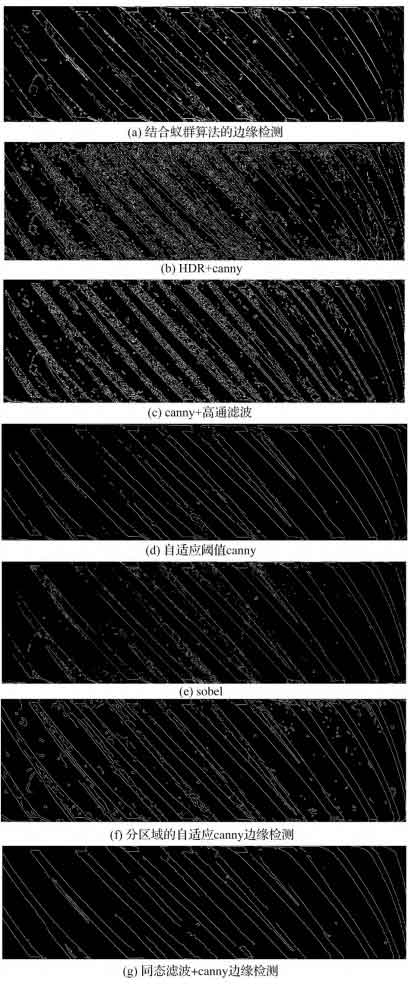
It can be seen from Fig. 2 that the edges detected by Sobel operator and Canny operator combined with high pass filter have many obvious breakpoints, and the Canny operator combined with phase consistency has almost the same effect as the Canny operator using Gaussian filter; Canny operator combined with HDR high dynamic range imaging algorithm has similar effect to gray-scale equalization in weak light, but the effect of edge detection in other areas becomes worse; The edge detected by ant colony algorithm is relatively smooth, but it does not solve the problem of breakpoints. Under the condition of global threshold, the above edge detection methods are not effective. In the edge detection algorithm by region, only the image in the middle part can use the adaptive threshold canny. The Gaussian filter kernel and edge detection threshold of the left and right images need to be manually set. The adaptive threshold of Otsu method will mistakenly recognize the reflection of the tooth bottom as an edge. Homomorphic filtering is the simplest and most effective method. The number of tooth lines extracted by this method is 1 more than that of the edge detection algorithm in the region.
In the environment of matlab2020a, the running time of edge detection algorithms combined with HDR and ant colony algorithm is more than 4 S, and the running time of adaptive Canny edge detection, Sobel, high pass filter canny and other algorithms in different regions is less than 0.1 s. The running time of the edge detection algorithm combining homomorphic filtering and Canny operator is less than 0.3 s.
Considering the effect of edge extraction and running time, the author uses an edge detection algorithm combining homomorphic filtering and Canny operator to extract edges.