
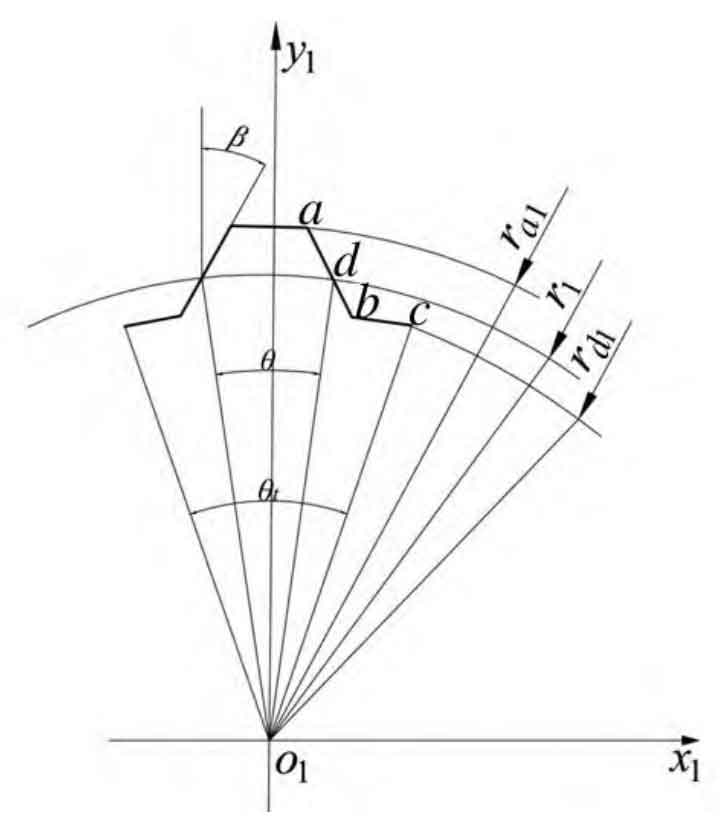
The external gear coordinate system S1: O1-x1y1 is established according to the parameters of the linear profile gear, as shown in Figure.
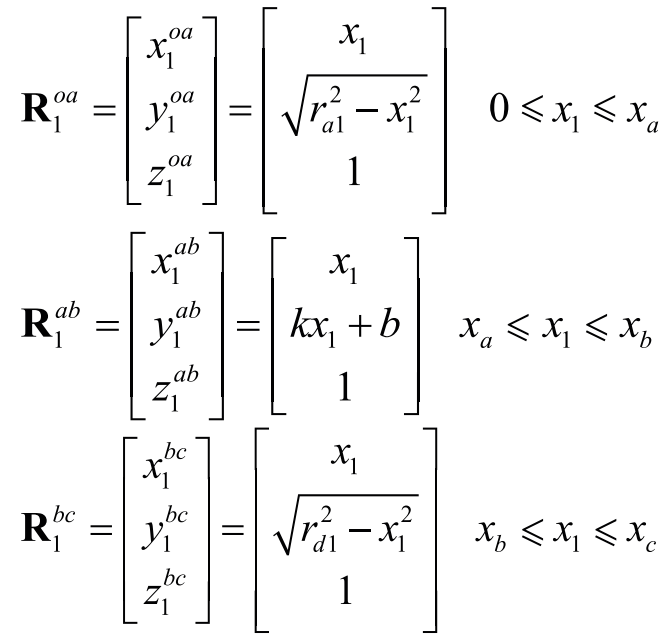
The mathematical model of each part of the external gear profile is described as follows:
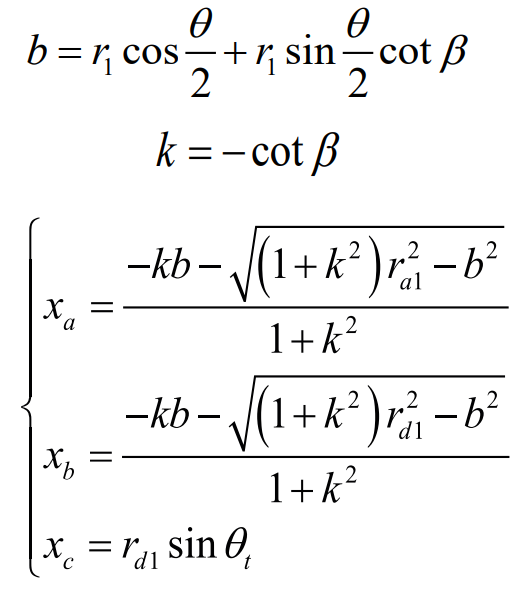
Where, b is the intercept of straight tooth profile, k is the slope of, xa, xb and xc are the abscissa values of points a, b and c respectively, and their values are:
Therefore, the mathematical model of external gear tooth profile can be expressed as:
