
In this study, we focus on the elastic deformation analysis of gear shafts under heavy loads, which is critical for designing high-performance gear transmission systems. The deformation of gear shafts, including bending, torsion, and compression, significantly affects tooth contact patterns, leading to uneven loading and potential failures. By employing finite element methods, we aim to quantify these deformations and propose theoretical tooth modification curves to optimize gear performance. This research is based on practical cases involving high-speed gear shafts from industrial gearboxes, and we present extensive data and curves to illustrate the deformation states. Our findings emphasize the importance of considering three-dimensional comprehensive elastic deformation for accurate tooth modification.
The gear shafts analyzed in this work are from high-speed stages of heavy-duty gearboxes, specifically models similar to MB450 and ZB650 types. These gear shafts transmit substantial power and torque, making them prone to elastic deformations. Key parameters of the gear shafts are summarized in Table 1, which includes details such as number of teeth, module, pressure angle, and helix angle. These parameters are essential for understanding the geometric and loading conditions.
| Parameter | Value for Type A | Value for Type B |
|---|---|---|
| Number of Teeth (z) | 24 | 28 |
| Module (mn / mm) | 6 | 7 |
| Normal Pressure Angle (αn / °) | 20 | 20 |
| Helix Angle (β / °) | 12 | 10 |
| Addendum Coefficient | 1.0 | 1.0 |
| Clearance Coefficient | 0.25 | 0.25 |
| Modification Coefficient | 0.4 | 0.3 |
The gear shafts operate under specific power, speed, and torque conditions, as shown in Table 2. These values are used to calculate the input torque and resulting loads on the gear shafts.
| Parameter | Type A | Type B |
|---|---|---|
| Power (P / kW) | 450 | 650 |
| Speed (n / rpm) | 1500 | 1800 |
| Torque (T / N·m) | 2864.8 | 3449.7 |
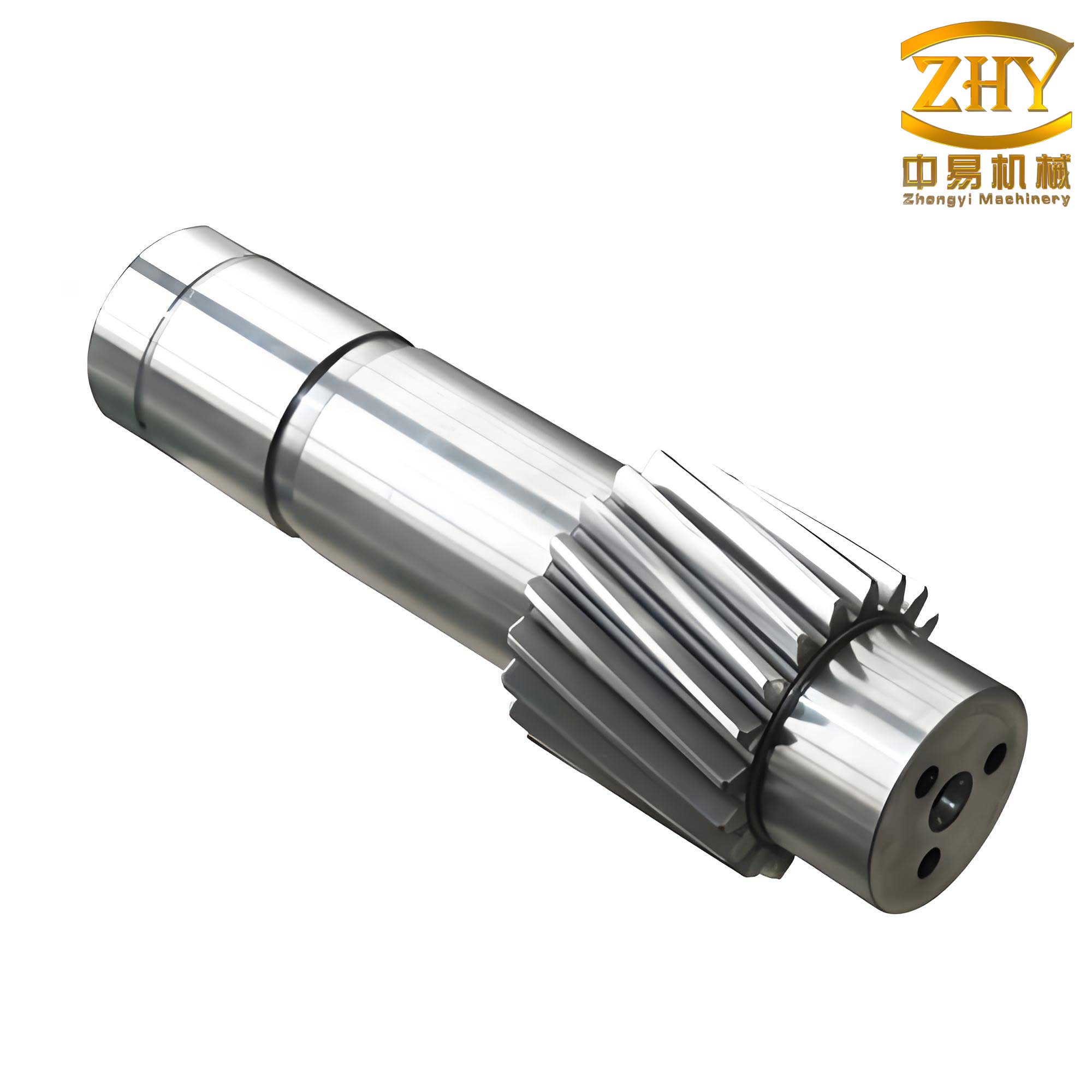
The geometric configuration of the gear shaft is illustrated below. The shaft features asymmetric bearing supports relative to the gear, with torque input from the left end. Key dimensions include the shaft length, gear width, and bearing positions, which influence the deformation behavior.
To analyze the elastic deformation of gear shafts, we developed a computational model using finite element methods. The model simplifies the gear shaft while preserving essential features for accurate analysis. Key aspects of the model include force analysis, support conditions, material properties, and mesh generation.
First, we consider the forces acting on the gear shafts. The input torque is calculated based on the motor’s rated power and speed. For a gear shaft under steady load, the torque is given by:
$$ T = \frac{P}{\omega} = \frac{60P}{2\pi n} $$
where \( T \) is the torque in N·m, \( P \) is the power in W, \( \omega \) is the angular velocity in rad/s, and \( n \) is the speed in rpm. Using the values from Table 2, we compute the torques for both gear shaft types.
The meshing force on the gear teeth is another critical load. For helical gears, the normal force \( F_n \) acts along the tooth profile, and we assume it is uniformly distributed along the contact line. The unit normal load per unit contact length \( p \) is derived from the total normal force \( F_n \) and the minimum contact length \( L_{\text{min}} \). The normal force is calculated as:
$$ F_n = \frac{T}{r_b \cos \alpha_n \cos \beta} $$
where \( r_b \) is the base circle radius, \( \alpha_n \) is the normal pressure angle, and \( \beta \) is the helix angle. The minimum contact length \( L_{\text{min}} \) depends on the gear geometry and is given by:
$$ L_{\text{min}} = \frac{b}{\cos \beta} \cdot \epsilon_{\alpha} $$
with \( b \) as the face width and \( \epsilon_{\alpha} \) as the contact ratio. Thus, the unit load is:
$$ p = \frac{F_n}{L_{\text{min}}} $$
We analyze four loading conditions corresponding to different positions of the load on the teeth, as shown in Figure 1 of the original text (not reproduced here). The distribution of load \( p \) along the tooth width is considered in our model.
Next, we address the support conditions for the gear shafts. The shafts are supported by rolling bearings at both ends, which provide radial reactions. However, bearings only offer compressive reactions, not tensile ones. To accurately model this, we use boundary elements to represent elastic support conditions. Additionally, axial forces from helical gears require constraints to prevent rigid body displacement, and tangential constraints are applied to balance torque errors. These boundary elements ensure realistic support conditions in our finite element analysis.
The material used for the gear shafts is a low-carbon alloy steel, carburized and hardened to a surface hardness of HRC 58-62. The material properties are assumed as follows: Young’s modulus \( E = 206 \text{ GPa} \), Poisson’s ratio \( \nu = 0.3 \), and density \( \rho = 7800 \text{ kg/m}^3 \). These values are used throughout the deformation analysis.
For the finite element model, we select 20-node isoparametric hexahedral elements due to their accuracy and flexibility in mesh generation. The gear shaft is discretized into 768 elements with 1152 nodes, including boundary elements. Along the length of the gear shaft, 24 cross-sections are defined to capture deformation details. The mesh for one gear shaft type is shown in Figure 2 of the original text, highlighting the dense grid near the gear and bearings for precision.
Now, we proceed to analyze the elastic deformations of the gear shafts. The primary deformations considered are bending, compression, and torsion. We present results for a representative gear shaft under full load conditions.
Bending deformation is evaluated by computing the deflection of the shaft axis in two orthogonal planes: the horizontal (X-Y) and vertical (X-Z) planes. The bending curve, derived from finite element results, shows that the maximum deflection occurs at the mid-span of the gear shaft. For instance, in one case, the maximum bending deflection is approximately \( 8.5 \times 10^{-3} \text{ mm} \). This small value indicates stiff gear shafts, but it still impacts tooth contact.
Compression deformation arises from the axial component of the meshing force. The axial force \( F_a \) is calculated as \( F_a = F_n \sin \beta \), and it causes the gear shaft to compress along its axis. Our analysis reveals that the compression deformation is minimal, typically below \( 1.0 \times 10^{-3} \text{ mm} \), as shown in a deformation curve. This negligible effect is often ignored in practice.
Torsion deformation is crucial for gear shafts transmitting torque. We compute the twist along the shaft, represented by the deformation of a generatrix line on the shaft surface. The torsion curve indicates that the maximum twist occurs near the torque input end, with values around \( 1.2 \times 10^{-2} \text{ rad} \). At the gear location, the twist is about \( 6.5 \times 10^{-3} \text{ rad} \). This torsion alters the helix angle locally, affecting tooth engagement.
To comprehensively describe the deformation, we combine bending and torsion into a three-dimensional comprehensive elastic deformation curve. This curve, plotted along the shaft length, represents the actual displacement of points on the gear shaft surface due to both bending and torsion. For example, the curve shows a sinusoidal-like pattern with peaks corresponding to maximum deformation zones. We propose that the symmetric line of this comprehensive curve serves as the theoretical tooth modification curve for gear shafts. This three-dimensional curve accounts for all significant deformations and provides a basis for precise tooth profiling.
The concept of a three-dimensional tooth modification curve is innovative, as it moves beyond traditional two-dimensional approaches. By considering the interplay between bending and torsion, we can design modification curves that compensate for elastic deformations more effectively. This is particularly important for heavy-duty gear shafts with high hardness surfaces, where running-in capabilities are limited.
In addition to shaft deformations, we also consider other elastic effects, such as tooth bending and local contact deformation at the meshing zone. However, our quantitative comparison, summarized in Table 3, shows that shaft bending and torsion dominate the total deformation. The table lists five deformation components and their approximate magnitudes for a typical gear shaft.
| Deformation Component | Approximate Magnitude | Relative Importance |
|---|---|---|
| Shaft Bending Deflection | \( 8.5 \times 10^{-3} \text{ mm} \) | High |
| Shaft Torsion Deformation | \( 1.2 \times 10^{-2} \text{ rad} \) | High |
| Shaft Compression Deformation | \( < 1.0 \times 10^{-3} \text{ mm} \) | Low |
| Tooth Bending Deformation | \( \sim 5.0 \times 10^{-3} \text{ mm} \) | Medium |
| Local Contact Deformation | \( < 1.0 \times 10^{-3} \text{ mm} \) | Low |
From this comparison, it is clear that when performing tooth modification, the bending and torsion of gear shafts must be prioritized. Tooth bending deformation is also significant for profile modifications. Based on these insights, we offer several recommendations for tooth modification of gear shafts.
If only torsion deformation is considered, a helix angle correction can be applied. The correction amount \( \Delta \beta \) can be derived from the torsion curve and is typically in the range of a few arc-minutes. For example, using the torsion data, we estimate \( \Delta \beta \approx 0.01^\circ \) for certain gear shafts.
For crowning or drum-shaped modifications to address bending, the crown amount can be set proportional to the maximum bending deflection. A common rule is to use a crown of about \( 1.5 \) times the deflection, e.g., \( 12.75 \times 10^{-3} \text{ mm} \) for the case above.
However, for optimal results, we advocate using the three-dimensional comprehensive elastic deformation curve as the basis for modification. The theoretical tooth modification curve is the mirror image of this deformation curve. By applying this curve during gear manufacturing, we can achieve uniform contact and reduce noise and wear. The mathematical representation of this curve can be approximated by a polynomial function:
$$ y(z) = A \sin\left(\frac{2\pi z}{L}\right) + B z^2 + C $$
where \( y(z) \) is the modification amount along the tooth width \( z \), \( L \) is the gear width, and \( A, B, C \) are coefficients derived from finite element results. This equation encapsulates both bending and torsion effects.
Furthermore, we introduce the concept of “target modification” for gear shafts. This approach tailors tooth modification to specific goals, such as enhancing anti-scuffing capacity, reducing vibration and noise, improving contact strength, or compensating for thermal deformations. Each target may require a different modification curve or amount. For instance, to minimize noise, the modification might focus on eliminating edge loading, while for high load capacity, the curve might emphasize stress distribution. This targeted strategy allows for customized solutions based on application requirements.
In conclusion, our research provides a detailed analysis of elastic deformations in gear shafts and proposes a methodology for deriving tooth modification curves. The three-dimensional comprehensive elastic deformation curve offers a realistic depiction of how gear shafts deform under load, and the corresponding theoretical modification curve enables precise compensation. We emphasize that for heavy-duty gear shafts, bending and torsion are the primary deformations to consider. By adopting target modification techniques, engineers can optimize gear performance for various operational conditions. Future work could explore dynamic loads, thermal effects, and experimental validation of these curves.
Throughout this study, the term “gear shafts” has been central, highlighting their role in transmission systems. The deformation behavior of gear shafts is complex, but with advanced finite element analysis and thoughtful modification strategies, we can design more reliable and efficient gear systems. The integration of three-dimensional curves represents a step forward in gear technology, ensuring that gear shafts operate smoothly under demanding conditions.