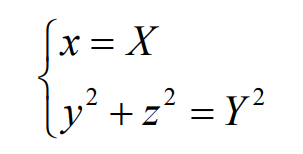
Since the coordinates (x, y, z) of any point on the tooth surface of hypoid gear have the following corresponding relationship with the point projected on xoy plane by rotation:
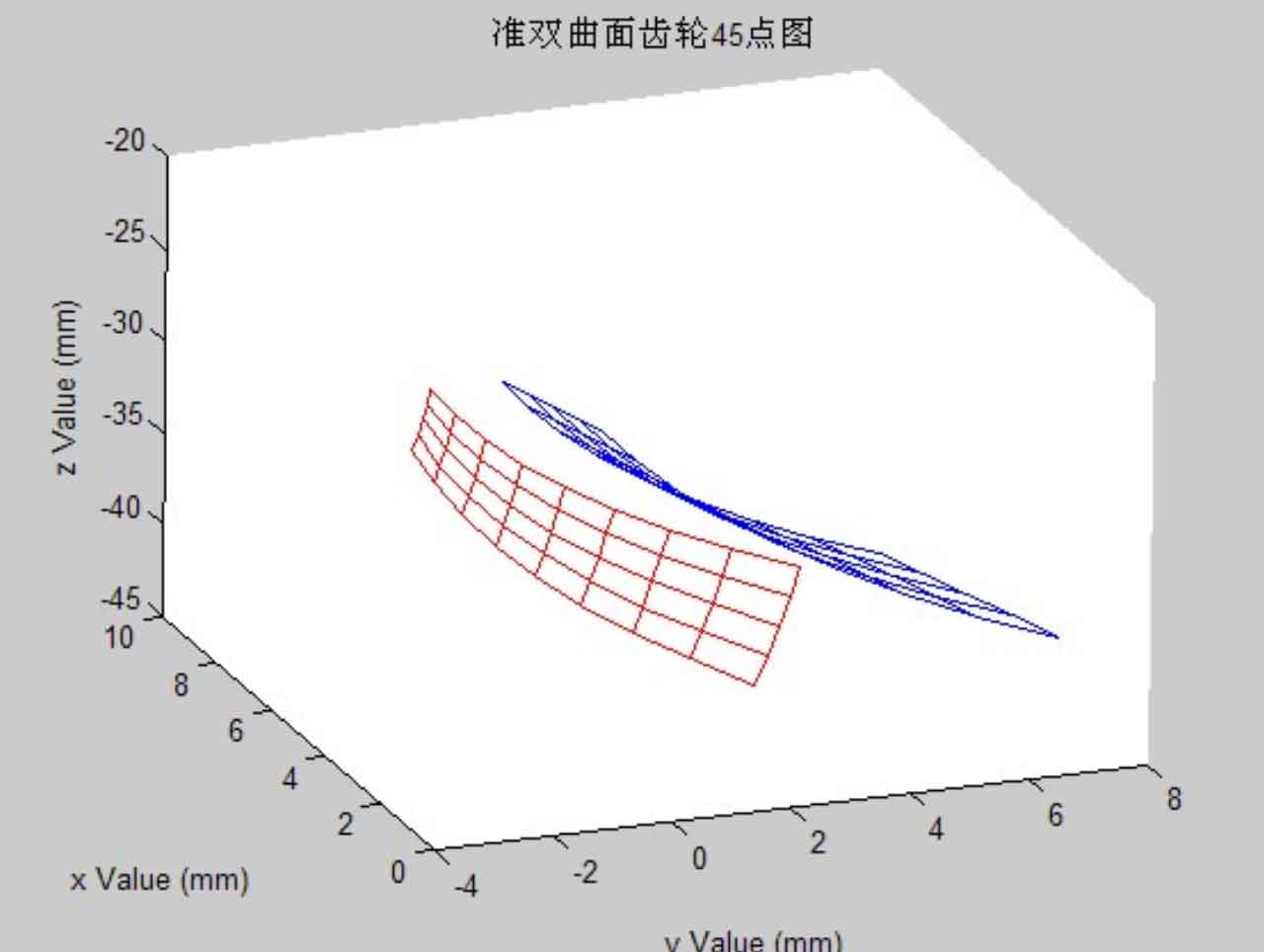
By substituting the formula into and solving the nonlinear equations, the tooth surface coordinate points of hypoid gear can be obtained. Because the simultaneous equation is a system of nonlinear equations, the approximate value and allowable error of one iteration must be given first. Through MATLAB software programming, the graphics generated in MATLAB are shown in the figure. The two meshes in the figure respectively represent the two tooth surfaces of the generated hypoid gear wheel. The intersection point on the mesh is the required three-dimensional coordinate point of the hypoid gear wheel.