
The cutting part is divided into rocker box, fixed shaft gear, gear shaft, cutting drum, planetary gear train and cutting motor

In the formula, MI, CI and Ki represent the mass matrix, damping matrix and stiffness matrix of substructure respectively, and the elements in damping matrix and stiffness matrix can be time-varying parameters; IR represents nonlinear load vector (constant or time-varying load is regarded as special nonlinear load), which can be external load or internal load, and is represented by function self defined subfunction in MATLAB. For a specific substructure dynamic equation, the individual coefficients of the general formula can be zero
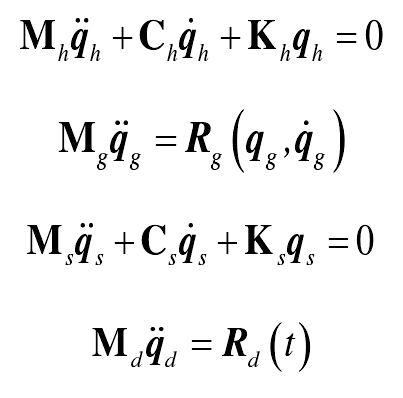
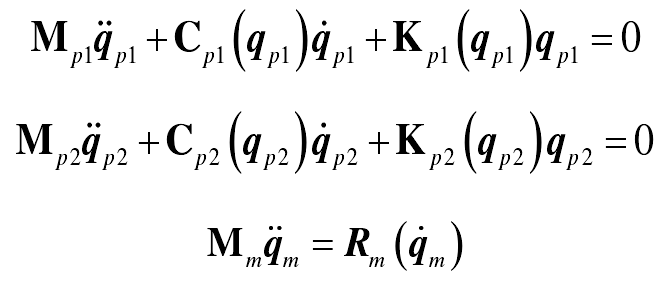
Where, the angle marks h, G, s, D, P1, P2 and m respectively represent the rocker box, fixed shaft gear, gear shaft, cutting drum, first stage planetary gear train, second stage planetary gear train and cutting motor; RG (QG, QG) is the nonlinear meshing load, which is related to the generalized displacement and generalized speed of the master-slave driving gear; Rd (T) is the time-varying cylinder load; CPI (QPI), KPI (QPI), (I = 1,2) are the time-varying damping and time-varying stiffness matrix of the I-stage planetary gear train respectively; RM (QM) is the driving torque of the cutting machine, which is related to the speed of the motor rotor.