
The dynamic excitation of helical gear system includes internal excitation and external excitation. The internal excitation of helical gear pair is the dynamic excitation generated in the meshing process of helical gear pair teeth. External excitation refers to the dynamic excitation of helical gear meshing and helical gear system caused by other external factors of helical gear system. For helical gear system, even if the external excitation is zero or constant, the helical gear system will be subject to the vibration and noise caused by this internal excitation.
The change of meshing contact tooth pair, tooth deformation and manufacturing and installation error of helical gear transmission system cause the internal dynamic excitation of helical gear in the meshing process, resulting in the vibration and noise of helical gear transmission system. The internal excitation of helical gear pair includes three forms.
① Stiffness excitation
Stiffness excitation refers to the dynamic excitation caused by the time-varying comprehensive meshing stiffness in the meshing process of helical gears. Due to the periodic change of the number of meshing teeth with time in the process of helical gear meshing and the change of elastic deformation in the process of gear meshing from tooth root to tooth surface, the meshing stiffness of helical gear is a function of time.
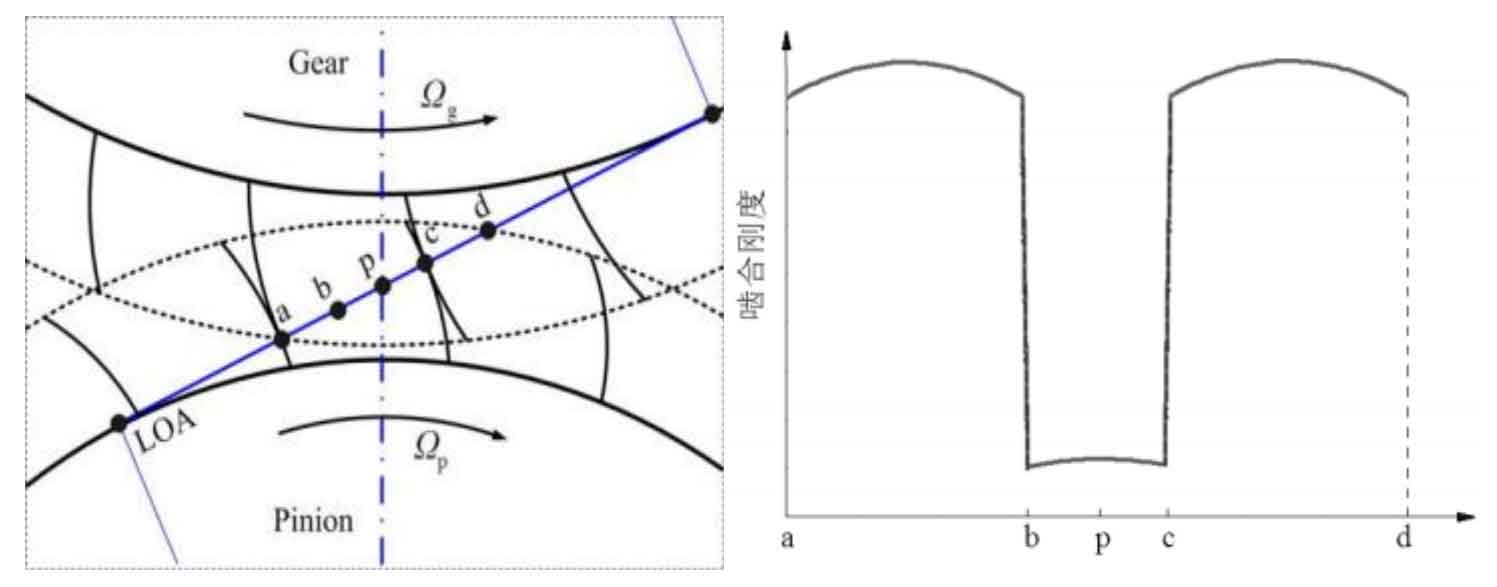
Assuming that the actual meshing position of helical gear is the same as that of ideal helical gear profile, the meshing stiffness of single pair of helical gear can be calculated by using the methods of material mechanics, mathematical elasticity and finite element method; The comprehensive meshing stiffness of the total meshing tooth pair is obtained from the simple superposition of the meshing stiffness of a single pair of teeth based on the coincidence degree of the helical gear system. The schematic diagram of meshing process of ideal tooth profile with coincidence degree between 1 and 2 is shown in Figure 1. Figure 1 (a) shows the meshing process of helical gear. Fig. 1 (b) shows the change curve of comprehensive meshing stiffness of helical gear. In Figure 1 (a), point P is the node position, AB and CD are the double tooth meshing area, BC is the single tooth meshing area, and the comprehensive meshing stiffness in the single double tooth alternating area will have a “step” mutation.
For the helical gear system, the teeth mesh alternately in the meshing process, and the meshing contact line is a “point line point” change process. The comprehensive meshing stiffness and tooth load of the teeth that change periodically in the meshing process will still cause the dynamic stiffness excitation in the meshing process. According to ANSI / AGMA ISO 1328-1, the meshing stiffness of a single pair of helical gears can be calculated according to the following expression:

Where: cm is the theoretical correction coefficient, generally taken as 0.8; Cr is the structure coefficient of wheel blank, which can be taken as 1 for solid gear; Q is the minimum value of tooth flexibility; CB is the basic tooth profile coefficient, and the expression is:

Where: HFP is the root height coefficient of the reference rack.
② Error excitation
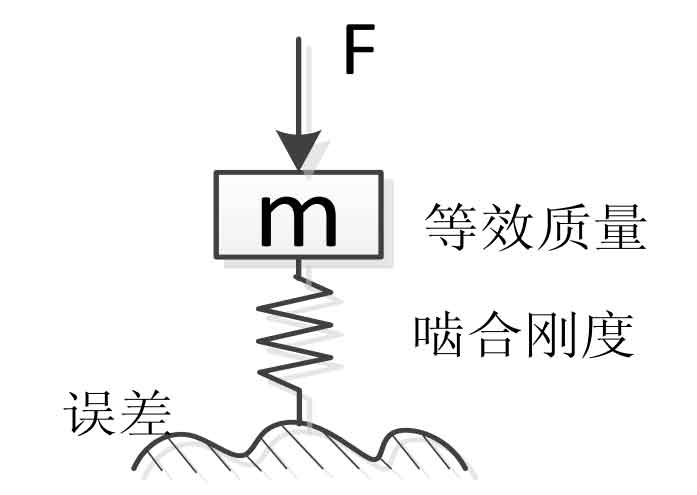
The machining and installation errors of helical gears and teeth, the actual position of meshing tooth profile deviates from the ideal theoretical position, and the instantaneous transmission ratio of helical gears changes, forming a displacement excitation in the meshing process, which is called error excitation. There are many kinds of helical gear manufacturing errors, including tooth profile error, tooth profile angle error, pitch error, etc. the influence of a single error term on helical gear noise is different; Among them, the pitch error and tooth profile error have the greatest influence on the vibration and noise of helical gear. The equivalent model of error excitation is shown in Figure 2.
In helical gear dynamics, starting with the study of the dynamic excitation of meshing error, the error of helical gear is often divided into two forms: pitch deviation and tooth profile deviation. There are four commonly used methods to deal with helical gear transmission error in vibration analysis, that is, it is expressed by the measured error value; Expressed by the measured error curve function; Expressed by Fourier series; Expressed by simple harmonic function.
③ Meshing impact excitation
During the meshing of helical gear pair, due to the manufacturing error of helical gear and the load deformation of gear teeth, the actual meshing point of gear teeth entering the meshing deviates from the ideal meshing point on the meshing line, resulting in the meshing impact of helical gear; The meshing impact of helical gear is generated when exiting meshing. These two kinds of impact are collectively referred to as meshing impact excitation. The difference between it and error excitation is that meshing impact is an impact excitation, while error excitation is a displacement excitation.
To sum up, stiffness excitation, error excitation and impact excitation can be divided into two types according to the nature of excitation, one is displacement excitation, one is stiffness excitation under load and error excitation of helical gear, and the other is impact excitation caused by meshing impact.