
Before visual image tracking, in order to ensure the tracking quality, it is necessary to use image segmentation method to extract the features of the contact area of the spiral bevel gear tooth surface in advance, increase the algorithm tracking experience, and enhance the tracking effect.
The traditional binary image segmentation method is adopted, and an appropriate threshold is taken to segment the image. Since the segmentation threshold needs to be determined according to the field data, otherwise the error is large, the theoretical formula for combining the field data is shown in formula (1).
In formula (1), (x, y) represents the pixel coordinates of the contact area trace image; G represents the original image; ξ Representing a divided image; T2 denotes a segmentation threshold. The trace pixels are determined, the contact area image is segmented according to the pixel height, and the feature extraction is realized according to the gray value relationship.
Assuming that the gray value range of the original image is 0 to Q2, the image feature range can be divided into two categories by the threshold T2. The pixel range of the background feature is 0 ~ kn, and the pixel range of the target trace is kn + 1 ~ Q2. The formula for determining the division based on this is shown in equations (2) to (4):
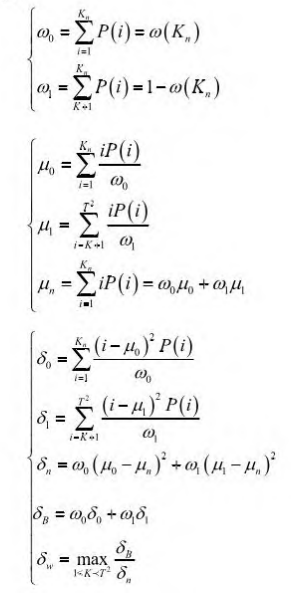
In equations (2) to (4), n represents the number of image grayscale values; P represents the total number of pixels in the original image; P (I) represents the average proportion of gray values; ω 0 ω 1 represents the proportion of the target and background gray values in the overall pixel; μ 0 μ 1、 μ N represents the proportion of the gray value of the target, background and the overall trace of the image to the overall pixel; δ 0 δ 1、 δ N represents the variance value of the target, background and the overall trace of the image; δ N represents the inter class variance of the trace; δ B represents the variance between the target and the background; δ W represents the maximum variance.
To sum up, a fast and effective segmentation method is used to extract the trace features of the contact surface image of spiral bevel gears. The trace features obtained by this method are accurately positioned and contain more detailed information, which can reduce the subsequent visual tracking error.