
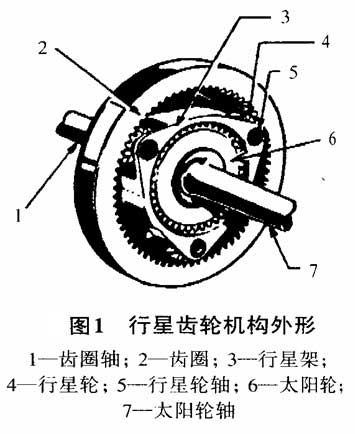
Composition of planetary gear mechanism: Simple (single row) planetary gear mechanism is the basis of transmission mechanism. Usually, the transmission mechanism of automatic transmission consists of two or more than three rows of planetary gear mechanism. The simple planetary gear mechanism includes a sun wheel, several planetary gears and a gear ring, wherein the planetary gear is supported by a fixed shaft of the planet carrier, which allows the planet wheel to rotate on the supporting shaft. Planetary gear and adjacent sun gear, ring gear are always in constant mesh state, usually use helical gear to improve the stability of work (as shown in Figure L).

As shown in the figure, the simple planetary gear mechanism is located in the center of the planetary gear mechanism. The sun gear and the planetary gear are often meshed, and the two outer gears are meshed in opposite rotation directions. Just as the sun is in the center of the solar system, the sun wheel is named for its position. In addition to being able to rotate around the support axis of the planet carrier, the planet wheel can also rotate around the central axis of the sun wheel driven by the planet carrier under some working conditions, just like the rotation of the earth and the revolution around the sun. When this happens, it is called the transmission mode of the planetary gear mechanism. In the whole planetary gear mechanism, if the rotation of the planet wheel exists, and the planet carrier is fixed, this kind of transmission similar to parallel shaft type is called fixed shaft transmission. The ring gear is an internal gear, which is often meshed with the planetary gear, and is meshed with the internal gear and the external gear, with the same rotation direction between them. The number of planetary gears depends on the design load of the transmission, usually there are three or four, the more the number, the greater the load.
A simple planetary gear mechanism is usually called a three-component mechanism, which refers to the sun gear, planet carrier and ring gear respectively. If these three components want to determine the motion relationship between them, in general, it is necessary to fix one of the components first, then determine who is the active component, and determine the rotating speed and direction of the active component. As a result, the rotating speed and direction of the passive component are determined.