
The dynamic bearing force is an important parameter in the dynamic response. The dynamic characteristics of the gear system are transmitted to the box body through the bearing, and then the vibration of the box body is excited to generate radiated noise, in which there may be squealing noise. Therefore, in the study of dynamic characteristics, firstly, the dynamic bearing force of the system under the excitation of unit gear transmission error is examined.



Figure 1, figure 2 and figure 3 respectively show the dynamic bearing forces of input shaft, intermediate shaft and front and rear bearings of differential under the second gear transmission error excitation. In a wide frequency range, there are frequencies with larger dynamic bearing force amplitude (288hz, 1212hz, 1800hz). The bearing force under these frequencies is likely to excite the box to generate squealing noise.
It should be pointed out that the dynamic response of each bearing to the error excitation cannot be completely consistent, and it is also related to the vibration mode of the system. In some frequencies, the excitation for a bearing may be very small, but if all bearings have peak bearing force, the frequency is likely to excite the box to generate noise. For example, 288hz, 1212hz and 1800hz.


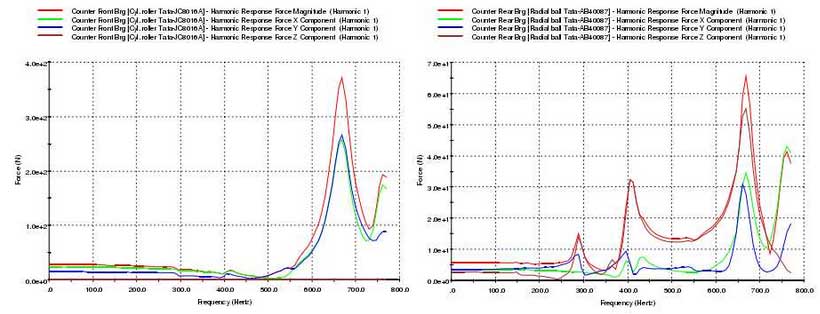
Figure 4, figure 5 and Figure 6 respectively show the dynamic bearing forces of input shaft, intermediate shaft and front and rear bearings of differential under the driving error excitation of main reduction gear. Almost all of the bearings have high bearing force at 668hz, while at 288hz and 405hz, the bearing force of the front and rear bearings of the input shaft is relatively high. However, the modal flexibility of the system at these two frequencies is very small (see the analysis in the previous section), which requires a lot of energy to excite the vibration of the system. Therefore, it is not considered that the obvious dynamic response of the system will occur at 288hz and 405hz.