
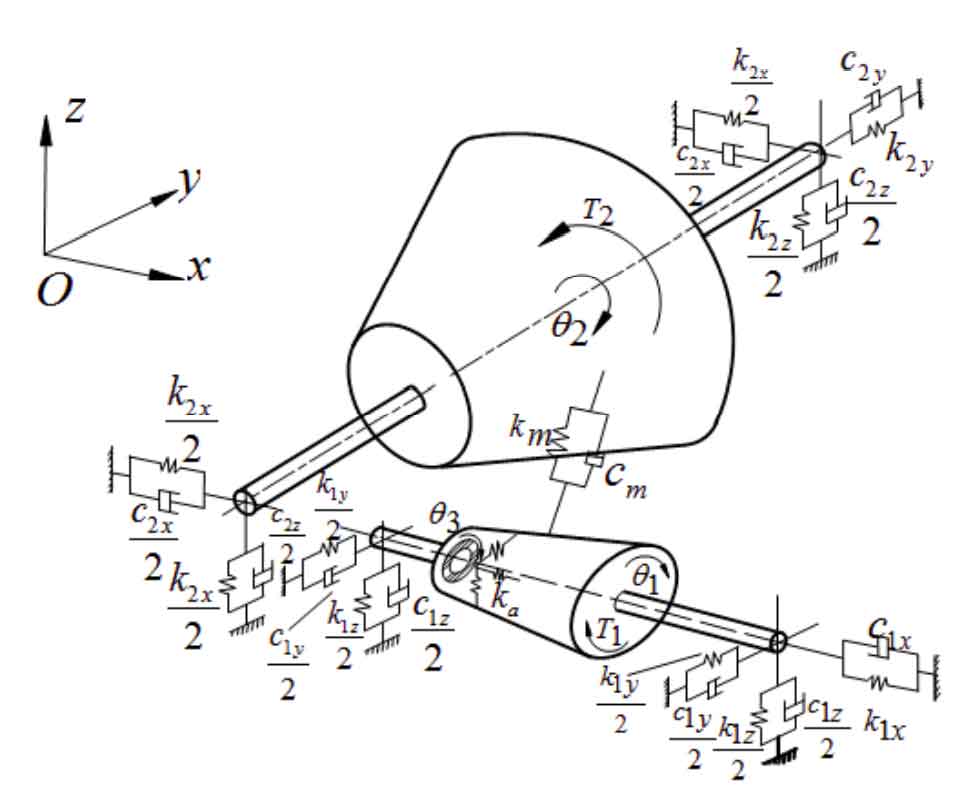
The figure shows the dynamic model of spiral bevel gear transmission system with additional damping ring under elastic support. Establish a rectangular coordinate system, the coordinate origin is the intersection of the axes of two spiral bevel gears, and the x-axis and y-axis are the axes of pinion and big gear respectively. The dynamic model is established based on the concentrated parameter method. The concentrated mass and concentrated moment of inertia are used to simulate the two spiral bevel gears and damping ring, the massless rigid body is used to simulate the shaft, and the spring and damper are used to simulate the elastically supported bearing. Because the torsional pendulum vibration has little influence on the system, for the convenience of analysis, the torsional pendulum vibration is ignored in this paper. In this way, the spiral bevel gear transmission system with 12 degrees of freedom and additional damping ring can be obtained, including the axial vibration, bending vibration and torsional vibration of the two gears along the x-axis, Y-axis and z-axis, as well as the coupling vibration of the damping ring along the x-axis, Y-axis and Z-axis and torsional vibration around the x-axis. Subscripts 1 and 2 represent the driving wheel and driven wheel respectively, and 3 represents the damping ring on the driving wheel.
The generalized displacement column vector of spiral bevel gear transmission system with additional damping ring is:
Where Xi, Yi and Zi (I = 1,2,3) are the transverse vibration displacement of spiral bevel gear and damping ring axis along x-axis, Y-axis and z-axis respectively; θ I (I = 1,2,3) is the torsional vibration displacement of driving gear around x-axis, driven gear around Y-axis and damping around X-axis respectively.