

The effectiveness of arcmde features is verified by using the fault simulation experimental data of planetary gearbox. As shown in Figure 1, the planetary gearbox fault simulation experimental platform is mainly composed of planetary gearbox, motor, hydraulic station, data acquisition instrument, vibration sensor and console. Taking K3 planetary gear train of gearbox as the research object, the detailed parameters of each gear in K3 planetary gear train are analyzed. Five kinds of gear fault parts are processed by WEDM: sun gear crack, sun gear broken tooth, planetary gear crack (sun gear side), planetary gear crack (ring gear side), planetary gear broken tooth. The five kinds of fault parts are shown in Figure 2. The size of the fault is as follows: the whole tooth width of the sun gear and planetary gear crack, the crack depth of the sun gear is 5mm, and the crack depth of the planetary gear is 4mm; The broken tooth of sun gear is to cut a tooth from the root circle; Planetary gear broken tooth is along the tooth top to the opposite tooth root cutting half teeth.

Experimental condition setting: gear IV, input speed 600r / min, no-load. The vibration measuring point is located on the top of K3 planetary array. DYTRAN piezoelectric vibration acceleration sensor is adopted. The model is 3215m1, the sensitivity is 10mV / g, and the measuring range is 500g; The dh5902 robust data acquisition system of Donghua testing company is used to collect the vibration acceleration signal. The sampling frequency is 20kHz. Three groups of data are collected for each state, and the sampling time of each group is 30s.
When VMD is used to decompose the normal state experimental data, it is necessary to determine the number of decomposition layers in advance. According to CFSA method, the center frequency histogram is obtained, as shown in Figure 3, and the frequency value corresponding to the abscissa center frequency number. The number of decomposition layers K corresponding to six kinds of vibration signals is determined to be 6. Six IMF are obtained by decomposing the signals, and the normalized mutual information between each kind of vibration signal and its IMF is calculated respectively. The average mutual information values of the six states are 0.53, 0.30, 0.36, 0.34, 0.34 and 0.42 respectively. The IMF reconstructed signal whose normalized mutual information value is greater than the average value is selected.
Each state takes 40 groups of samples, the training set and test set are 20 groups, each sample length is 5000 points, rcmde feature calculation parameters are set as follows: embedding dimension M = 3, number of levels C = 6, delay d = 1, maximum scale factor τ max=15。
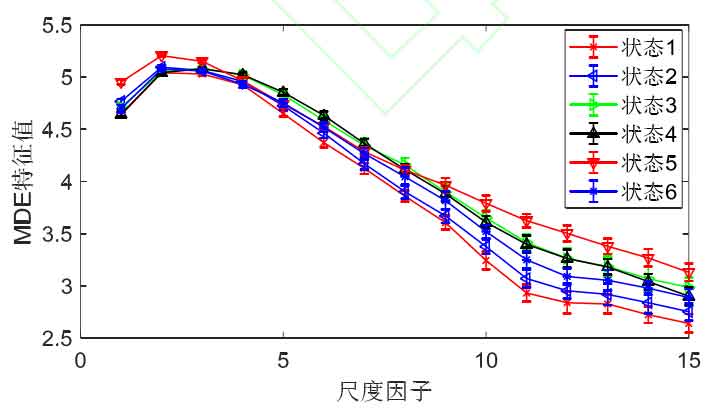
In order to verify the effectiveness and advantages of arcmde, we compared arcmde with rcmde and mde. According to the proposed process of feature extraction and fault pattern recognition, the mean standard deviation of three kinds of eigenvalues of experimental signal under 15 scales is obtained, as shown in Fig. 3, FIG. 4 and Fig. 5 respectively.


The coincidence degree and ranking of the three features in different scales. The feature vectors of five scales with high coincidence degree are constructed and input into the PSO-SVM classifier. The classification results of the three features are shown in Figure 6, Figure 7 and figure 8, and the classification accuracy is 100%, 80% and 75.8% respectively.



Comparing the mean standard deviation of MDE and rcmde, we can see that the change trend of mean standard deviation of MDE and rcmde with scale factor is similar, but the rcmde standard deviation is less than MDE, which may be the main reason for the improvement of classification accuracy. The calculation time of main functions and features is obtained by using the “run and time” module of MATLAB. Because MDE only considers one coarse-grained sequence, while rcmde considers multiple coarse-grained sequences, its computation time will be doubled.
Compared with rcmde, the classification accuracy of arcmde features is significantly improved, reaching 100%. Although the calculation time of arcmde has increased, in the actual fault diagnosis, it needs to manually select the scale when using rcmde features to build feature vectors, and the time consumed is not considered. Therefore, in general, the time cost of arcmde will not increase significantly, but its accuracy has been significantly improved.
Aiming at the shortcomings of rcmde feature, an improved feature arcmde is proposed. The effectiveness and advantages of the proposed feature are verified by the experimental data of planetary transmission. Firstly, CFSA method is used to determine the number of VMD components as 6, and the signal is decomposed into 6 IMFs. According to the mutual information criterion, the first three IMFs of state 1 and state 6 and the first two IMFs of state 2 to state 5 are selected to reconstruct the signal to achieve noise reduction. The first five scales (15,14,13,12,11) of arcmde feature are selected to construct the feature vector, which is input into PSO-SVM. The fault diagnosis accuracy reaches 100%. When the first five scales of MDE (1, 2, 3, 7, 4) and rcmde (13, 12, 1, 14, 8) were input into PSO-SVM, the accuracy of fault diagnosis was 75.8% and 80% respectively. Therefore, the fault diagnosis accuracy of the proposed features is significantly improved. Due to the increase of VMD preprocessing, the calculation time of arcmde is 19.9% more than that of rcmde, but the accuracy is increased by 20%. It is also worth sacrificing a certain time cost to improve the accuracy under certain conditions.