
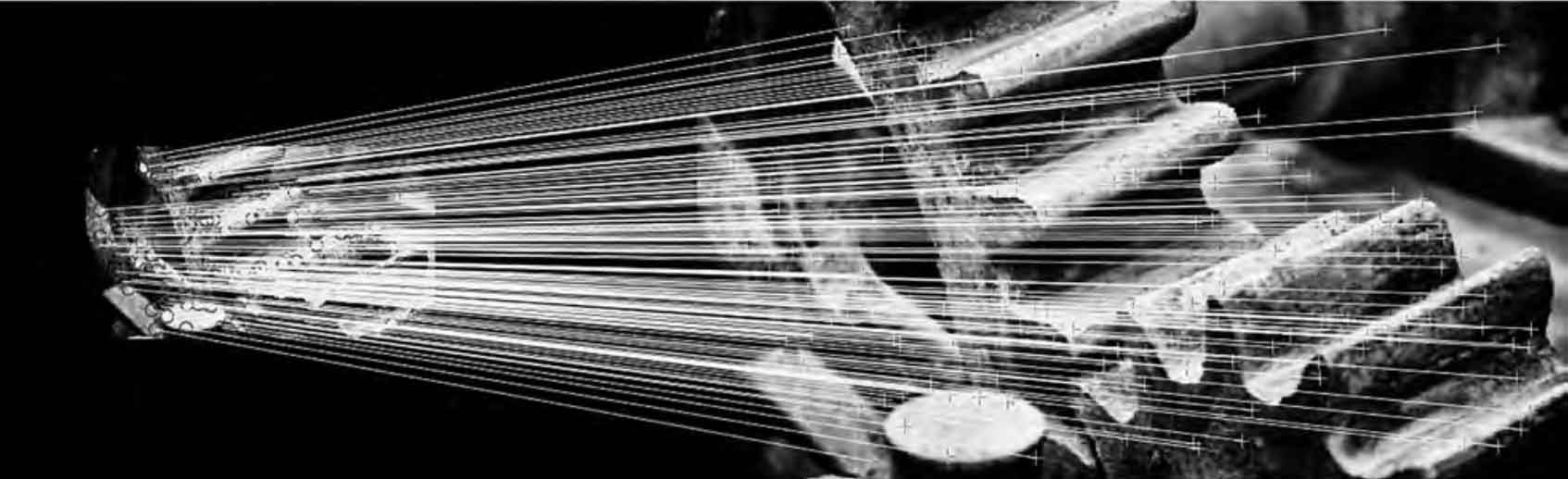
The advantages and disadvantages of feature extraction can determine the complexity and difficulty of the algorithm. A simple understanding is to extract the region of interest in the image. The target of feature extraction of spur gear image is to obtain the corresponding in-range divergence in the subspace. At present, the main feature extraction includes texture feature, color feature, etc. The feature extraction of spur gear defects is shown in the figure.
In the segmentation algorithm of spur gear defect image, the optimization algorithm of K-means clustering analysis is clearly put forward, and the human optimization algorithm is applied to K-means clustering algorithm, which improves the global search ability of K-means clustering analysis. According to the comparison between the improved K-means clustering algorithm and common image denoising methods, the proposed spur gear defect surface detection algorithm can well achieve the purpose of image segmentation, The precision of spur gear image segmentation is improved, and the application value of the algorithm is good. Finally, the feature extraction of spur gear defect image is carried out to complete the defect detection.