
In modern precision manufacturing, the efficiency and accuracy of machine tools are paramount. However, their full potential is often unlocked not by the machine alone, but by the tooling that holds the workpiece. Fixturing technology has evolved in tandem with machine tools, moving towards high precision, high efficiency, modularity, and cost-effectiveness. The design of production fixtures directly impacts throughput, quality, and operational flexibility. This article details our journey from a cumbersome, time-consuming fixturing method for machining gear shafts to the development and implementation of a high-performance, modular clamping system centered on a tapered elastic sleeve, significantly boosting our machining productivity.
Challenges with Traditional Gear Shaft Fixturing
Our production of Klingelnberg-type spiral bevel gear shafts was historically constrained by the capacity of our older gear-cutting machines. These machines limited us to a maximum module of 10, a maximum shaft diameter of φ150 mm, and a maximum gear outer diameter of φ630 mm. The fixturing used for these gear shafts was relatively simple but came with significant operational drawbacks that became unacceptable with the acquisition of new, high-performance machinery.
The old fixture operated on a direct pull-back principle. The gear shaft was placed into a locating body connected to the machine table. A drawbar was then threaded into a tapped hole at the tail end of the workpiece shaft. A hydraulic system pulled the drawbar, clamping the workpiece against the locating body’s face. A key and keyway prevented rotation. While functionally adequate, this design had critical inefficiencies:
- High Auxiliary Time: Every single workpiece required manually threading and unthreading the long drawbar and tightening/un-tightening a locknut. This process was time-consuming and labor-intensive.
- Weakened Workpiece: The need for a positive-drive key necessitated machining an anti-rotation keyway on the shaft diameter of the gear shaft. This keyway acted as a stress concentrator, potentially weakening the shaft for its final application and complicating downstream processing.
- Alignment Difficulty: Aligning the long, flexible drawbar with the threaded hole in the gear shaft was challenging and became more difficult with longer shafts, increasing the risk of cross-threading and damage.
With the procurement of a state-of-the-art German CNC bevel gear cutting machine, featuring automated setup and high-precision software for contact pattern simulation, the bottleneck shifted squarely to fixturing. The machine’s speed and accuracy demanded a fixture that was equally precise, reliable, and rapid to load and unload. The old method’s auxiliary times were now prohibitive, directly hurting equipment utilization and overall efficiency. A new fixture design was imperative.
Design of a Modular Taper-Sleeve Clamping Fixture
Modern fixture design is built upon five core functional elements: Connection Elements (to the machine), Locating Elements (for the workpiece), Clamping Devices (the power system and mechanism), Auxiliary Devices, and Tool Guidance Elements. For our new gear cutter, which incorporated a built-in hydraulic clamping cylinder, our task was to design the optimal interface—the middle transmission mechanism and the actual clamping elements—to hold the gear shafts securely.
Our solution is a modular fixture system where the core clamping action is achieved through a precision tapered elastic sleeve. The system’s components and their functions are detailed below:
| Component No. | Component Name | Primary Function | Role in Fixture System |
|---|---|---|---|
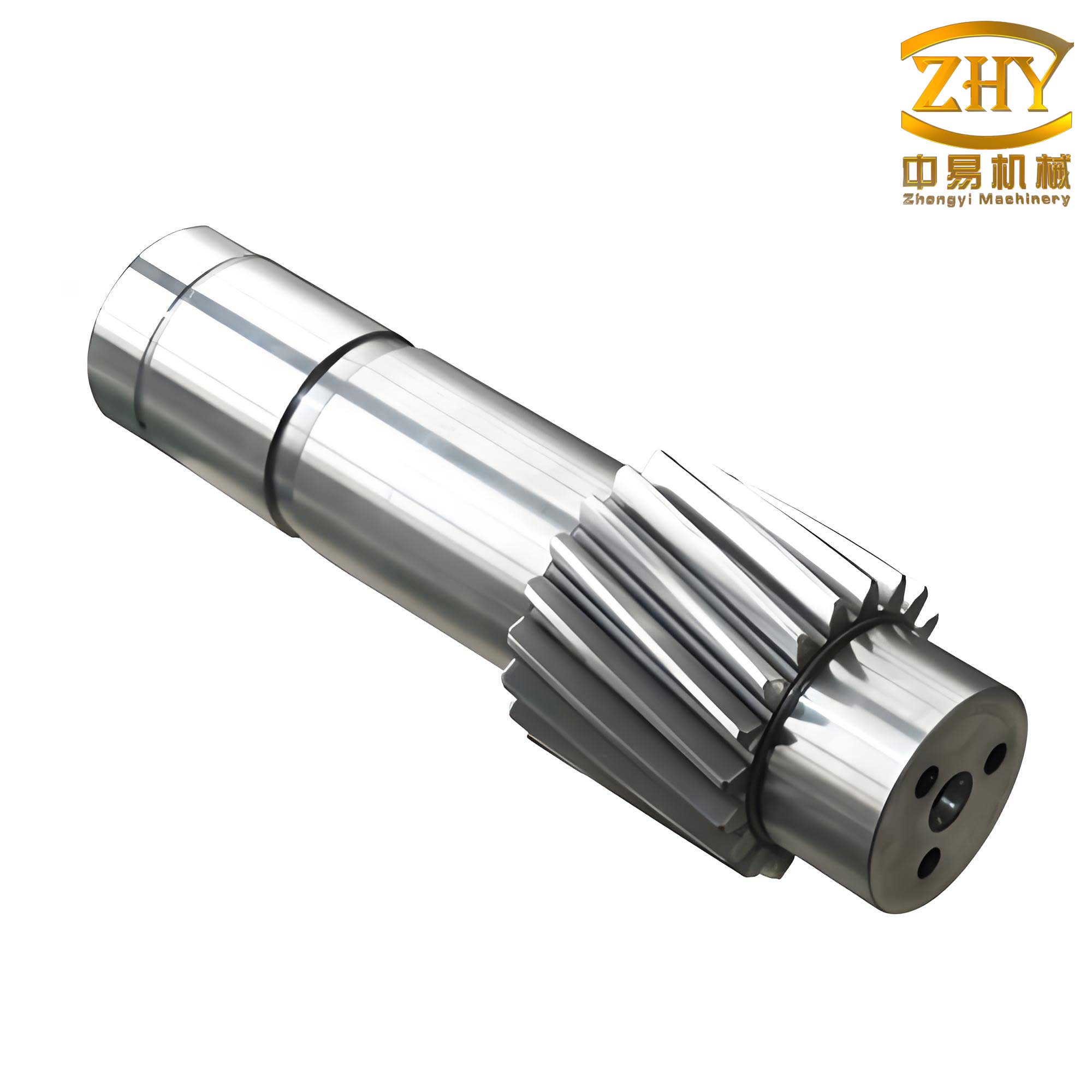
| 1 | Gear Shaft (Workpiece) | Part to be machined. | N/A |
| 2 | Locating Bushing | Provides radial and axial location for the workpiece. | Locating Element |
| 3 | Support Sleeve | Supports the elastic sleeve; provides reaction force for clamping. | Locating/Reaction Element |
| 4 | Tapered Elastic Sleeve | Elastically deforms to clamp the workpiece shaft radially. | Clamping Element |
| 5 | Threaded Adapter | Connects the pull-rod to the elastic sleeve. | Force Transmission Element |
| 6 | Pull Rod | Transmits axial force from the machine cylinder. | Force Transmission Element |
| 7 | Connection Hub | Interface between the machine’s hydraulic cylinder and the fixture. | Connection/Force Transmission Element |
Working Principle: The operation is elegantly simple and fast. The gear shaft is inserted through the locating bushing (2) until its end face seats positively. The machine’s hydraulic system is then activated. The hydraulic cylinder pulls the connection hub (7), which transmits the axial force through the pull rod (6) and threaded adapter (5) to the tapered elastic sleeve (4). As the sleeve is pulled axially into the conical bore of the stationary support sleeve (3), its thin-walled tapered section is forced to contract radially. This uniform contraction creates a powerful, concentric clamping force directly onto the cylindrical surface of the gear shaft, holding it immovably during the cutting process. Unclamping is instantaneous: releasing hydraulic pressure allows the elastic sleeve to spring back, freeing the workpiece.
In-Depth Mechanical and Performance Analysis
The fundamental requirement for any cutting fixture is that the clamping force-generated friction torque must exceed the maximum cutting torque. The tapered elastic sleeve is the heart of this system, and its performance can be precisely modeled.
1. Force Analysis of the Tapered Elastic Sleeve
The sleeve acts as a collet. An axial pull force $F_a$ causes radial contraction via the taper interface. We analyze the forces on the elastic sleeve in equilibrium.
Assumptions: Friction at the taper interface is considered. Let $W_1$ be the total reaction force from the support sleeve taper, and $W_2$ be the total reaction force from the workpiece (shaft) on the sleeve’s inner surface. Let $\mu_1$ and $\mu_2$ be the coefficients of friction at the taper and shaft interface, respectively. Let $\alpha$ be the semi-cone angle of the taper, and $\theta_1$, $\theta_2$ be the friction angles where $\tan \theta_1 = \mu_1$ and $\tan \theta_2 = \mu_2$.
Resolving forces axially and radially on the elastic sleeve:
$$W_1 \sin(\theta_1) + W_2 \sin(\theta_2 + \alpha) – F_a = 0 \quad \text{(1)}$$
$$W_1 \cos(\theta_1) – W_2 \cos(\theta_2 + \alpha) = 0 \quad \text{(2)}$$
From (2), we get $W_1 = W_2 \frac{\cos(\theta_2 + \alpha)}{\cos(\theta_1)}$. Substituting into (1) and solving for $W_2$:
$$W_2 = \frac{F_a}{\sin(\theta_2 + \alpha) + \frac{\cos(\theta_2 + \alpha)}{\cos(\theta_1)} \sin(\theta_1)}$$
$$W_2 = \frac{F_a \cos(\theta_1)}{\sin(\theta_2 + \alpha)\cos(\theta_1) + \cos(\theta_2 + \alpha)\sin(\theta_1)} = \frac{F_a \cos(\theta_1)}{\sin(\theta_1 + \theta_2 + \alpha)}$$
The normal pressure $N_1$ exerted by the sleeve on the workpiece shaft is related to $W_2$ by $W_2 = \frac{N_1}{\cos(\theta_2)}$. Therefore,
$$N_1 = W_2 \cos(\theta_2) = \frac{F_a \cos(\theta_1) \cos(\theta_2)}{\sin(\theta_1 + \theta_2 + \alpha)} \quad \text{(3)}$$
The maximum friction torque $M_1$ this normal force can transmit for a shaft diameter $d_0$ is:
$$M_1 = N_1 \cdot \mu_2 \cdot \frac{d_0}{2} = \frac{F_a \cos(\theta_1) \cos(\theta_2) \mu_2 \cdot d_0}{2 \sin(\theta_1 + \theta_2 + \alpha)} \quad \text{(4)}$$
For a typical design with $F_a = 30,000$ N (approx. 3,000 kg-f), $\alpha = 8^\circ$, $\mu_1 = \mu_2 = 0.15$ ($\theta \approx 8.53^\circ$), and $d_0 = 140$ mm:
$$M_1 = \frac{30000 \cdot \cos(8.53^\circ) \cdot \cos(8.53^\circ) \cdot 0.15 \cdot 0.14}{2 \cdot \sin(8.53^\circ + 8.53^\circ + 8^\circ)} \approx 599.24 \ \text{N·m}$$
2. Calculation of Cutting Torque for Bevel Gear Shafts
Cutting spiral bevel gear shafts is a complex interrupted milling process. The initial cuts involve single-tooth slotting, evolving to two-teeth engagement. We calculate the power and torque for the most demanding single-tooth engagement phase. The empirical formula for milling power $N$ (in kW) is:
$$N = C_N \cdot 10^{-5} \cdot D^{g} \cdot t^{x} \cdot S^{y} \cdot B^{u} \cdot Z \cdot n \cdot K_{MN} \quad \text{(5)}$$
Where for face milling (approximating the cutter action):
$C_N = 2.0$, $g=0.14$, $x=0.86$, $y=0.72$, $u=1.0$.
$D$ is cutter diameter (210 mm), $t$ is cutting depth (3 mm), $S$ is feed per tooth (0.1 mm/tooth), $B$ is milling width (100 mm), $Z$ is number of teeth (10), $n$ is spindle speed (rpm).
Spindle speed $n$ for a cutting speed $v=100$ m/min: $$n = \frac{1000 \cdot v}{\pi \cdot D} = \frac{1000 \cdot 100}{\pi \cdot 0.210} \approx 1516.5 \ \text{rpm (corrected from original)}$$
Substituting values (converting mm to cm for power formula consistency): $D=21.0$ cm, $t=0.3$ cm, $S=0.01$ cm/tooth, $B=10.0$ cm.
$$N = 2.0 \cdot 10^{-5} \cdot (21.0)^{0.14} \cdot (0.3)^{0.86} \cdot (0.01)^{0.72} \cdot (10.0)^{1.0} \cdot 10 \cdot 1516.5 \cdot 1.0$$
$$N \approx 2.0 \cdot 10^{-5} \cdot 1.58 \cdot 0.39 \cdot 0.0407 \cdot 10.0 \cdot 10 \cdot 1516.5 \approx 0.078 \ \text{kW}$$
This basic power must be adjusted for the workpiece material (20CrMnTi, $\sigma_b = 1100$ N/mm²). The tangential cutting force $P_z$ is:
$$P_z = \frac{60 \cdot 10^3 \cdot N}{v} = \frac{60000 \cdot 0.078}{100} \approx 46.8 \ \text{N}$$
This seems low; practical values are higher due to chip thickness variation and material strength factors not fully captured in the simple $C_N$. A more general force estimate uses specific cutting energy $k_c$. For alloy steel, $k_c \approx 2500$ N/mm² for a feed of 0.1 mm. The metal removal rate $Q$ is:
$$Q = t \cdot S \cdot Z \cdot n \cdot B = 3 \cdot 0.1 \cdot 10 \cdot 1516.5 \cdot 100 = 454,950 \ \text{mm}^3/\text{min} = 7.58 \times 10^3 \ \text{mm}^3/\text{s}$$
Power $N = k_c \cdot Q / 60,000 = 2500 \cdot 7.58 \times 10^3 / 60,000 \approx 315.8 \ \text{W} \approx 0.316 \ \text{kW}$.
Tangential force $P_z = (60000 \cdot 0.316) / 100 \approx 189.6 \ \text{N}$.
We must apply a comprehensive safety factor $K$ to account for real-world conditions:
$$K = K_0 \cdot K_1 \cdot K_2 \cdot K_3 \cdot K_4 \quad \text{(6)}$$
Where $K_0=1.5$ (basic), $K_1=1.2$ (material), $K_2=1.2$ (tool wear), $K_3=1.2$ (interrupted cut), $K_4=1.3$ (clamping stability). Thus, $K \approx 2.7$.
The final estimated tangential cutting force $P$ is:
$$P = P_z \cdot K = 189.6 \cdot 2.7 \approx 511.9 \ \text{N} \quad \text{(7)}$$
The cutting torque $M_e$ at the mean diameter $d_a$ of the cut (approximately 140 mm) on the gear shaft is:
$$M_e = P \cdot \frac{d_a}{2000} = 511.9 \cdot \frac{0.140}{2} \approx 35.8 \ \text{N·m} \quad \text{(8)}$$
For a two-tooth engagement, the torque could theoretically double to $M_{e1} \approx 71.6$ N·m.
3. Safety Factor Evaluation
Comparing the fixture’s clamping torque capacity $M_1$ to the maximum estimated cutting torque $M_{e1}$:
$$ \text{Safety Factor} = \frac{M_1}{M_{e1}} = \frac{599.24}{71.6} \approx 8.4$$
This substantial safety margin confirms that the tapered elastic sleeve fixture provides more than adequate clamping force for machining these gear shafts, even under severe or unpredictable cutting conditions.
| Parameter | Old Drawbar Fixture | New Tapered Sleeve Fixture |
|---|---|---|
| Clamping Principle | Axial drawbar pull, requires keyway. | Radial elastic contraction, pure friction hold. |
| Loading/Unloading Time | High (manual threading/unthreading). | Very Low (insert and actuate hydraulic cycle). |
| Workpiece Integrity | Compromised (requires weakening keyway). | Preserved (no shaft modifications needed). |
| Alignment & Setup | Difficult, prone to error. | Simple and foolproof. |
| Clamping Torque Capacity | High, but dependent on thread integrity. | Very High, with large safety margin (~8.4). |
| Modularity & Flexibility | Low (dedicated to specific shaft end). | Very High (change sleeve & bushing for new shaft diameters). |
Economic and Operational Advantages
The shift to this modular fixture system has delivered profound benefits beyond mere technical performance. Its economic and operational advantages are multi-faceted:
- Dramatic Reduction in Non-Cut Time: The single biggest gain is in reduced auxiliary time. Changing a gear shaft now takes seconds instead of minutes, drastically increasing machine utilization and overall equipment effectiveness (OEE).
- Enhanced Flexibility and Reduced Inventory: The fixture’s modular design embodies the principles of reusability and reconfigurability. To adapt to a new family of gear shafts with different diameters, only two components need redesigning and manufacturing: the locating bushing (2) and the tapered elastic sleeve (4). The entire force-transmission module (parts 5,6,7,3) remains unchanged. This standardization slashes fixture development costs and lead times for new projects.
- Improved Quality and Consistency: The concentric, uniform clamping of the elastic sleeve minimizes workpiece distortion and ensures repeatable positioning. This contributes directly to improved gear quality, consistency in tooth geometry, and stability of the contact pattern across a production batch.
- Ergonomic and Safety Benefits: The elimination of manual handling of heavy drawbars and the risk of threaded connection failures improves workplace safety and reduces operator fatigue.
Conclusion and Future Perspectives
The development of this tapered elastic sleeve modular fixture represents a significant advancement in our approach to machining critical components like bevel gear shafts. By moving away from a dedicated, operationally cumbersome design to a flexible, high-efficiency system, we have successfully bridged the gap between the capabilities of a modern CNC gear-cutting machine and the practical realities of shop floor productivity.
The core innovation lies in the reliable application of a fundamental mechanical principle—taper-induced elastic deformation—to create a clamping system that is simultaneously powerful, precise, and fast. The mechanical analysis confirms its robustness, providing a clamping torque safety factor well over 8, which is crucial for handling the dynamic loads of gear milling.
This case study underscores a critical lesson in advanced manufacturing: investing in intelligent, modular tooling is not an ancillary cost but a direct driver of throughput, quality, and adaptability. The success with our gear shafts paves the way for applying similar modular fixturing philosophies to other families of rotationally symmetric parts, further consolidating gains in efficiency and economic performance across our production lines. Future work may explore integrating sensor technology into such fixtures for real-time monitoring of clamping force or process stability, taking the first steps towards truly smart, connected tooling systems.