
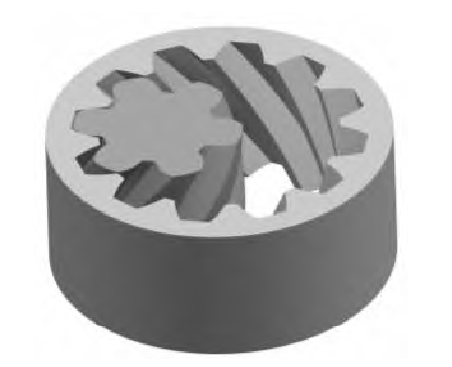
According to the tooth surface generation method of parallel shaft internal meshing linear gear and pure rolling meshing condition introduced in the previous paper, the accurate solid model of linear gear pair is constructed by using nx8.5. This paper introduces the basic parameters of modeling. The 3D solid model of line gear pair created is shown in Figure 1.

The coincidence degree greater than or equal to 1 is the necessary condition to ensure the continuous meshing transmission and the continuity and stability of transmission. In this paper, the number of teeth of driving gear is 6. According to the calculation formula of coincidence degree, the coincidence degree of linear gear can be obtained as follows:

When the coincidence degree is 1.5, two pairs of teeth participate in the meshing at the same time, and these two pairs of teeth are based on the pure rolling condition, so the linear gear pair can maintain the pure rolling meshing state in the continuous transmission process.

The kinematics simulation of the installed line gear pair is carried out, as shown in Figure 2. The angular velocity of input shaft fixed with pinion is given as ω 1. Set the contact form between the pinion and the ring gear as 3D contact, and measure the angular velocity curve of the ring gear through the speed sensor ω 2, as shown in Figure 3. The angular velocity of pinion is 10 rad / s, and the angular velocity of ring gear fluctuates from 4.84 rad / s to 5.11 rad / s; The average transmission ratio is 2.00, the mean square error is 5.1×10000, and the maximum variation is 0.07. The experimental results show that the pure rolling parallel axis internal meshing line gear mechanism constructed by this method can realize smooth and continuous speed transmission, and meet the requirements of design transmission ratio. The experimental results further verify the feasibility of the tooth surface design method. Compared with the theoretical value, the sources of motion simulation error are: the tooth surface deformation leads to the deviation between the instantaneous contact path and the theoretical contact path; In addition, the length of the data stored in the computer is limited, so the error is introduced.
