
The three-dimensional solid model of the Involute Spur Planetary gear drive is shown in the figure, and the assumptions used in the dynamic modeling are the same as those of the fixed-shaft gear drive.
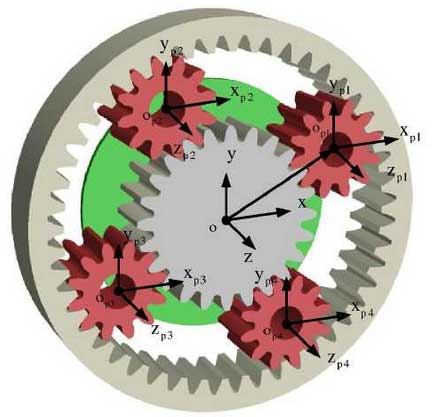
The three-dimensional dynamic model of planetary gear drive is shown in the figure. There are two coordinate systems in the figure. The first one is the fixed coordinate system Oxyz, the origin of which is located at the theoretical rotation center of the sun gear, planetary carrier and ring gear; the second one is the relative coordinate system of planetary gears, whose origin is located at the center of the planetary wheel axle and is fixed to the planetary carrier, and each coordinate axle is always parallel to the fixed coordinate system.Each gear and planetary carrier in planetary gear drive contains two degrees of lateral translation freedom θxk and θyk, one degree of torsion freedom Thezk and two degrees of swing freedom Thexk and Theyk.Subscripts k=s, r, C and PI represent the sun gear, planetary carrier, ring gear and the first planetary gear respectively, and subscripts i=1,2…N and N represent the number of planetary wheels.

Like fixed-axle gears, the plane force system that interacts between planetary and planetary gear rings of the sun gear is equivalent to the meshing force and the offset moment perpendicular to the meshing surface.The influence of center distance change and tooth surface and back engagement state change on the direction of engagement force action is analyzed for outer engagement pair composed of sun gear planetary gear and inner engagement pair composed of ring gear planetary gear respectively.