According to the measured symmetry deviation, it can be known that in herringbone gear transmission system, the relative left rotation deviation of the driving wheel is 0.025mm, and the relative left rotation deviation of the driven wheel is 0.048mm. It is further obtained that the deviation of the center angle of the teeth on both sides of the driving gear is 54 ″, and the deviation of the center angle of the teeth on both sides of the driven gear is 35 ″. See the table for the dynamic parameters of herringbone gear transmission.
| Parameter | Pinion | Wheel |
| Mass m / kg | 8.388 | 55.497 |
| Moment of inertia I / kg · m ^ – 2 | 0.013 | 1.011 |
| Symmetry deviation fa / mm | 0.02 | 0.02 |
| Input speed n / r · min ^ – 1 | 1000 | 1000 |
| Load torque T / N · m | 102.3 | 97.7 |
| Radial support stiffness ky / N · m ^ – 1 | 6.34X10^8 | 6.34X10^8 |
| Axial support stiffness kz / N · m ^ – 1 | / | 2.03X10^8 |
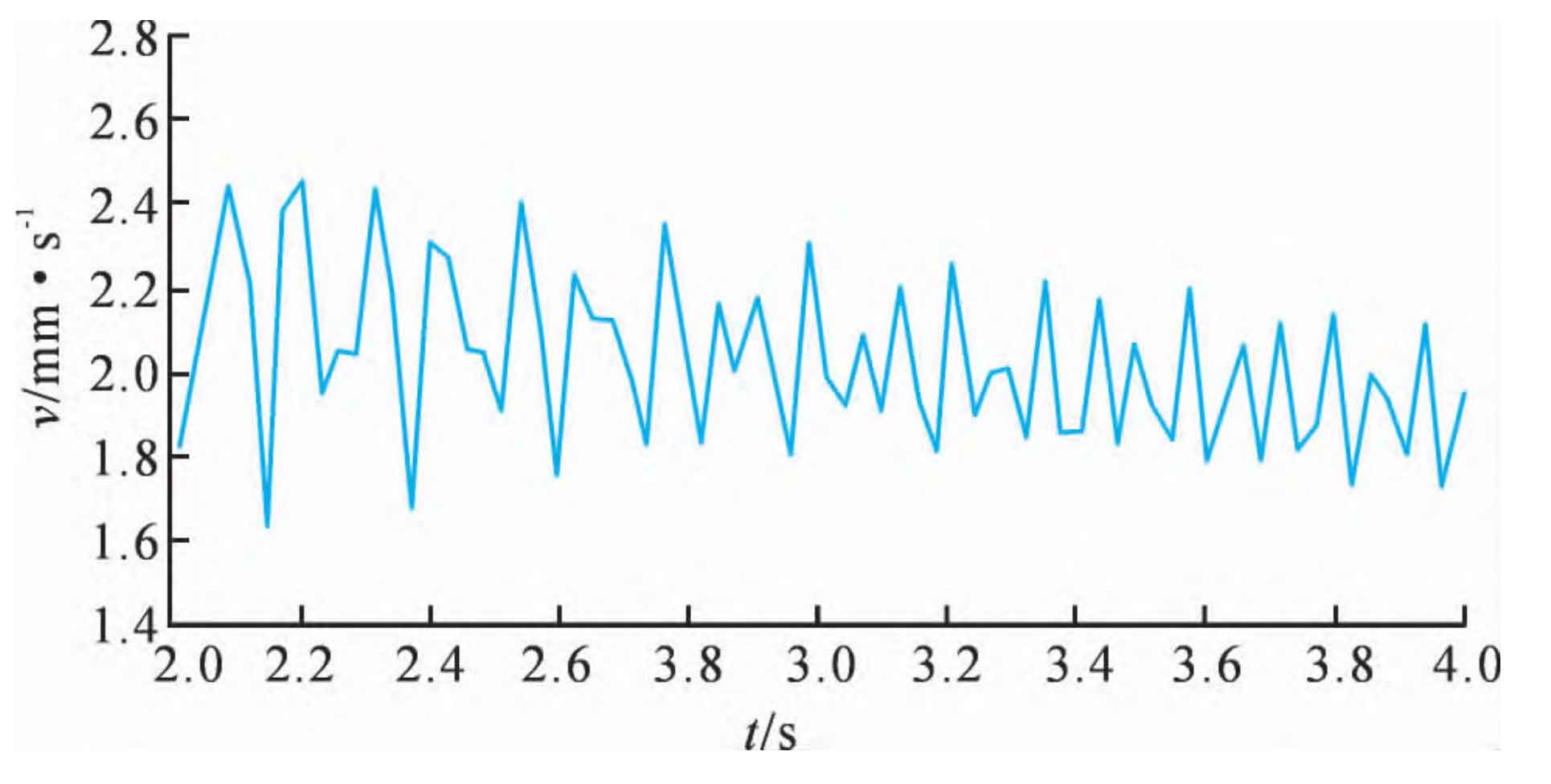
The vibration of herringbone gear transmission can be calculated according to the given dynamic model, and the axial vibration speed of herringbone gear can be obtained as shown in the figure.