
Helical gears are the core transmission components of automotive transmissions, as well as engineering machinery, aerospace, rail transit, and military vehicles. They operate at high speeds in complex transmission environments, with the tooth surface mainly bearing contact stress and the tooth root mainly bearing bending stress. Fatigue pitting on the tooth surface is one of the main ways for helical gears in automotive transmissions to malfunction. Tooth pitting reduces the strength of helical gears, leading to pitting failure. The lifespan of helical gears is directly related to the working performance and service life of transmissions. Therefore, timely detection of pitting faults in the helical gears of transmissions is of great significance for the research and reliable operation of automotive automatic transmissions and related power transmission devices.
In recent years, domestic and foreign researchers have conducted in-depth research on the problem of pitting corrosion of helical gears from different perspectives. LI Y et al. compared the system dynamics models of normal helical gears and helical gears with pitting corrosion, studied the excitation sources of vibration frequency components such as rotational frequency harmonics, modulation sidebands, and resonance frequency bands, and analyzed the frequency characteristics of normal helical gears and faulty helical gears. LIANG X et al. modeled helical gears with different degrees of pitting, studied the effect of pitting on the meshing stiffness of helical gears, and established an analytical model to obtain the relationship between the severity of pitting and the meshing stiffness. HUANGFU Y et al. obtained the meshing characteristics of pitting helical gear pairs based on the tooth loading contact analysis method, established a dynamic model of pitting helical gear pairs, and obtained fault characteristics under different degrees of peeling. HAN L et al. combined slice method, discrete integral method, and potential energy method to establish an analysis model for tooth surface pitting and tooth breakage, and studied the influence of pitting defects and tooth breakage on meshing stiffness. MA R et al. established a dynamic model of helical gear pairs considering time-varying mesh stiffness, studied the degree of pitting on helical gears, and analyzed the dynamic characteristics of the structure using time history analysis, trajectory analysis, and frequency spectrum analysis methods. RINCON A et al. calculated contact forces by combining finite element models with Hertz contact theory, reducing computational complexity and explaining the effects of cracks and pitting on helical gear meshing. HUANGFU Y et al. used the slice method to calculate the time-varying meshing stiffness of helical gears and obtained the variation law of the meshing stiffness of cracked helical gear pairs. A spur gear wear prediction model considering tooth tip clearance was established by combining the tooth load contact analysis method with the helical gear dynamic model. The influence of tooth tip clearance and surface wear on meshing and dynamic characteristics was studied. MOHAMMED OD et al. established a 6-degree-of-freedom helical gear dynamics model and conducted time-domain and frequency-domain analysis to identify faults in helical gear cracks of different sizes. XIANG D et al. proposed a new hysteresis damping factor to study the contact collision state of helical gears; In the analysis process, an influencing factor was proposed to evaluate the impact of support force on collision, which is of great significance for establishing the dynamic model of helical gears. WAN Z and others used a dynamic model coupled with lateral and torsional vibrations to simulate the vibration response of gear systems with tooth cracks. LIANG X et al. established a dynamic model for simulating vibration source signals and proposed an improved Hamming function to represent the influence of transmission paths. By analyzing the synthesized vibration signals, the fault characteristics of solar gear tooth cracks were identified. YANG L et al. proposed a spur gear dynamic model that considers the effects of tooth surface roughness changes and geometric deviations caused by pitting and peeling. The model combines time-varying meshing stiffness, time-varying load distribution ratio, dynamic tooth contact friction force, friction torque, and dynamic meshing damping ratio to study the effects of pitting and peeling on gear transmission vibration response. Through summarizing the above research, it is found that most of the current research on gear pitting fault diagnosis is focused on spur gears, and the established dynamic models are mostly aimed at spur gears. The research mainly focuses on different degrees of pitting on a single tooth surface. There is relatively little research on pitting fault diagnosis and dynamic fault feature analysis of helical gears, as well as multi tooth surface faults of helical gears.
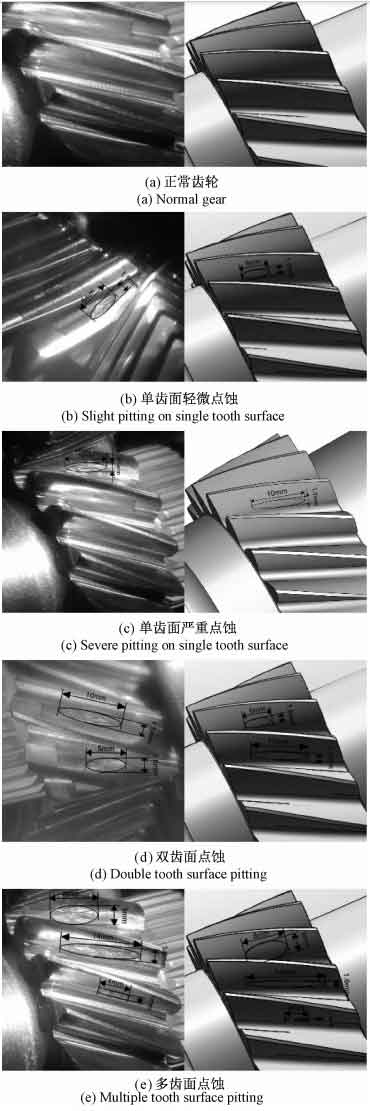
A simulation model of helical gears with different degrees of pitting on a single tooth surface and different numbers of tooth surfaces was established using 3D modeling software, and dynamic simulation was conducted. Finally, the correctness of the established model was verified through experiments on pitting faults in helical gears. To provide a basis for the diagnosis and identification of single tooth surface with different degrees of pitting and multi tooth surface pitting faults.
Based on the theory of helical gear dynamics, combined with fault dynamics simulation models and bench tests, the dynamic response characteristics of single tooth surface with different degrees of pitting and multi tooth surface pitting of helical gears were studied. The time-frequency response laws of pitting degree and number of pitting tooth surfaces were explored, providing support for the prediction and diagnosis of the health status of helical gear transmission systems.
1) A dynamic model for pitting helical gear faults was established, and the contact force response characteristics of different types of pitting faults were analyzed. This provides a basis for diagnosing pitting faults on single tooth surfaces with different degrees of pitting and multiple tooth surfaces, and the correctness of the model was verified through experiments.
2) When single tooth surface pitting occurs, in the time domain, the amplitude increases with the degree of pitting and periodic impacts occur. In the frequency domain, the amplitude of low-frequency frequency conversion and harmonics, high-frequency meshing frequency and twice the meshing frequency amplitude, as well as the number of adjacent sidebands, increase with the degree of pitting corrosion.
3) Helical gears with multiple tooth surface pitting exhibit periodic impacts in the same rotation period as helical gears in the time domain, but the signal distribution becomes sparse as the number of pitting tooth surfaces increases. In the frequency domain, the amplitude of low-frequency frequency conversion and harmonics, high-frequency meshing frequency, and the number of sidebands near twice the meshing frequency increase with the increase of the number of pitting tooth surfaces. Unlike single tooth surface pitting, a sideband appears between the rotational frequency and the meshing frequency, and the number and amplitude increase with the increase of the number of pitting tooth surfaces.