
Using the parametric design of helical gear in Chapter 2, a helical gear with the same modulus as helical cylindrical gear is generated for meshing motion simulation. The design input parameters of helical gear are: modulus Mn = 2.5mm, number of teeth Z2 = 80 and pressure angle α = 20 °, helix angle β = 10 °, tooth width b = 10mm, addendum height coefficient h * an = 1 and addendum clearance coefficient C * n = 0.25.
1. Meshing assembly
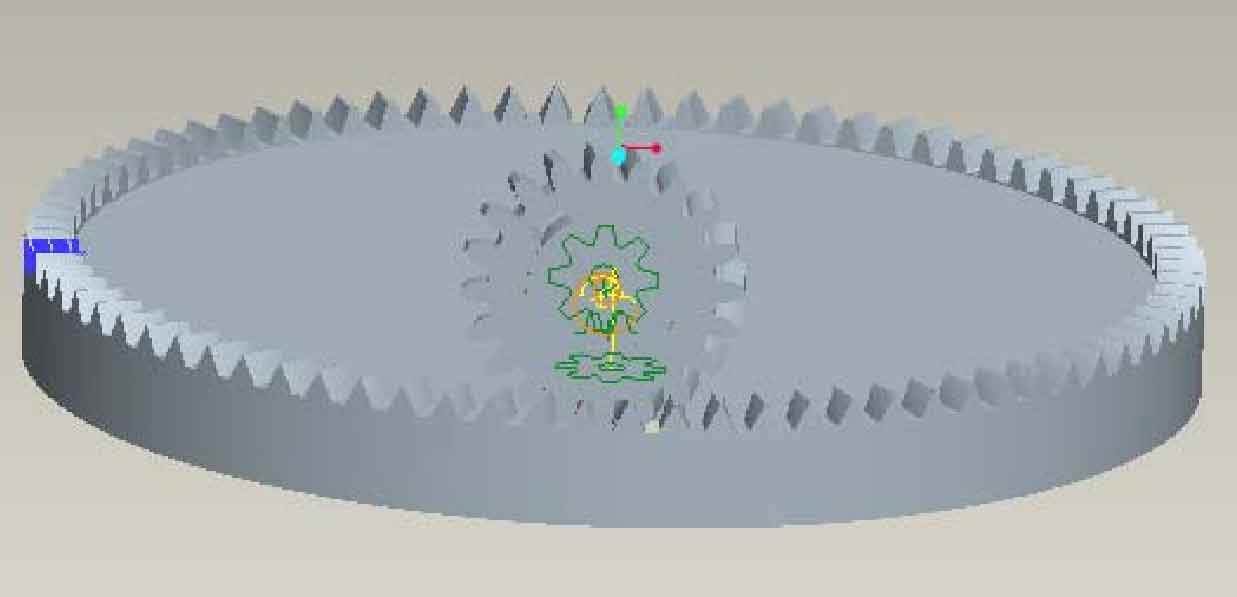
According to the relative position relationship between helical cylindrical gear and helical surface gear, the positioning pins of the two gears are created, the position relationship of the two gears is determined by the relative position relationship between the positioning pins, and then the two gears are assembled. In order to carry out accurate meshing assembly of the two gears, the following two points need to be paid attention to in the assembly process: (1) make the two tooth profiles tangent; (2) the correctness of the relative position of the two gears. Figure 1 is the meshing assembly drawing of the face gear.

2. Meshing motion simulation
Motion simulation is an important part of mechanism module design in Pro / e. it can not only realize the design simulation, kinematics analysis and dynamics analysis of complex three-dimensional mechanisms, but also use motion simulation to realize mechanism design and motion trajectory verification. Through dynamic simulation analysis, it can not only check the accuracy of gear parametric modeling, but also vividly understand the gear meshing principle.
Using the motion simulation part of Pro/E, the meshing motion simulation analysis of helical cylindrical gear and helical surface gear is realized. After the two are assembled, by defining the connecting shaft of the gear, Add the motion pair (i.e. gear pair), input the speed and transmission ratio of the two, add the driver (servo motor) and set the time, so that the gear mechanism can carry out the meshing motion simulation according to the actual motion, so as to reflect the real meshing motion of the mechanism. Using this meshing motion simulation, it can detect whether the two gears interfere in the meshing process.
Through the meshing motion simulation of helical cylindrical gear, the motion process is analyzed and the conclusion is drawn: in the whole process of meshing motion simulation, the tooth surfaces of the two gears do not interfere with each other, and their meshing state is good, so the solid model of helical gear created is correct, as shown in Figure 2.