
Introduction
Planetary gearboxes are widely used in aerospace equipment such as robots, wind turbines, ships, heavy equipment, and helicopters. During long-term use, planetary gearboxes are affected by environmental and load changes, and the internal gear surfaces are prone to wear, pitting, cracking, and even broken teeth. As we all know, the earlier the fault is diagnosed, the less the loss will be. In planetary gearboxes, the turnover mode of planetary gears is unique. This makes the vibration signals of planetary gearboxes have unique mutual modulation characteristics. Even under normal circumstances, there are many sidebands in their frequency spectrum. Therefore, in the vibration spectrum of a faulty planetary gearbox, weak initial fault characteristics are easily submerged and cannot be extracted. Therefore, how to accurately extract weak initial fault characteristics of planetary gearboxes has always been a key focus of research in fault diagnosis of planetary gear transmission equipment. The empirical mode decomposition method proposes to decompose non-stationary signals into different frequency bands to achieve signal stabilization within each frequency band, and is widely used in fault diagnosis of planetary gearboxes. Using EMD and deep convolutional neural network methods, the fault characteristics of planetary gearboxes are classified and identified. Using EMD, singular value decomposition, and probabilistic neural network methods, planetary gearboxes are diagnosed for faults. However, the feature recognition of these methods relies on the completeness of the samples. Research has been conducted on using singular value decomposition and EEMD to denoise nonlinear vibration signals, and it has been found that this method has good suppression effects on white noise and impulse noise. However, this method cannot extract weak modulated fault characteristics well. Therefore, this paper proposes an adaptive feature extraction method based on EEMD-SSA and adaptive linear prediction filtering. Compared to traditional analysis methods based on EEMD-SSA, this method does not require pre-learning of sample data, but estimates the frequency spectrum of sensitive regions of planetary gearbox fault characteristics through ALPF, which can demodulate weak modulated information from complex signals and improve the signal-to-noise ratio of initial fault characteristics of planetary gearboxes.
Basic Principles
A series of intrinsic mode functions can be adaptively obtained based on the waveform of the time-domain signal, making the signal linear and stable in each mode. However, this decomposition method has a phenomenon of mode mixing, and sometimes the degree of linearization in the mode is not high, which affects the subsequent processing effect. EEMD is an auxiliary analysis method that adds Gaussian zero-mean white noise before EMD on the signal. Because white noise is evenly distributed across various frequency bands, averaging multiple additions does not affect the effective frequency components of each IMF, but can compensate for the impact of some frequency losses. Adding white noise of the same power multiple times, and then calculating the expectation of IMFs in the same frequency band, the expectation of different frequency bands is the IMFs of EEMD. This new set of IMFs has a high probability of overcoming the uneven distribution of extreme points in EMD processing, enhancing the continuity of the signal in various frequency bands.
SSA feature enhancement method
SSA is a method that highlights the periodic characteristics of time series, which includes decomposition and reconstruction. The main content is to decompose and reconstruct the time series segment, construct a phase space matrix H with coordinate delay, and then calculate the eigenvalues of matrix HHT. These eigenvalues are the singular values of matrix H, and Select the top singular values by size and reconstruct the time series with their eigenvectors. The process is as follows.

Sort λi (i=1, 2,…,r) from largest to smallest. For vectors in r-dimensional space, the magnitude of singular values reflects the degree of linearity in the matrix. The larger the singular value, the greater the corresponding eigenvector, which reflects the degree of linearity in the original matrix and can express complete matrix information. The small and nonlinear components of the signal, which reflect in smaller singular values, are generally considered to be noise components and are discarded during signal reconstruction.
ALPF technology
Due to interference from factors such as changes in operating conditions and noise, spectral lines in the frequency domain of signals often exhibit spectral splitting and false peaks, which affect the identification of spectral lines. Linear prediction techniques can effectively reduce spectral splitting and false peaks, and adaptively improve spectral resolution. Currently, it has played an important role in the application of speech signal processing. Its basic principle is that in a sampling sequence, the sampling value of a certain order can be approximated by linear combinations of the values of several previous sampling orders. After SSA processing, the signal can reduce the error of linear prediction due to its improved autocorrelation, which has a good promoting effect on it. Because in narrowband signals, the correlation of non-Gaussian modulation components can be greatly enhanced. Therefore, this article uses spectral kurtosis algorithms to select the frequency band with the largest kurtosis in the frequency domain for bandpass filtering. Then, linear prediction is performed on the filtered signal, which increases the stability of the prediction coefficient and reduces the computational load. If the original signal is a stationary signal, the error ε(n) is zero, or white noise. If the original signal is a non-stationary signal, the error ε(n) also includes other noise and non-periodic components.
Fault diagnosis method based on EEMD-SSA and ALPF
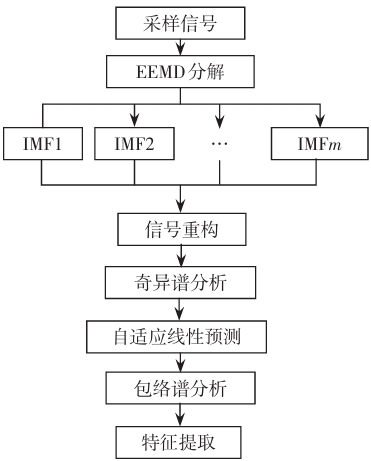
Combining EEMD, SSA, and ALPF algorithms, a method for extracting the initial fault characteristics of planetary gearboxes was developed. In this method, the EEMD method First, it is used to denoise the vibration signal of the planetary gearbox. Then, the SSA method is used to further denoise and highlight the hidden information carried by the signal. Then, the ALPF is used to select the appropriate frequency band and perform adaptive filtering. The specific implementation steps of the ES-ALPF fault diagnosis method are shown in the figure.
1) Utilize the empirical mode decomposition method to decompose the sampled signal into different intrinsic mode functions.
2) Apply the kurtosis index to reconstruct the signal. Select all the intrinsic mode functions obtained from the decomposition, and superimpose and combine those with kurtosis greater than the average to reconstruct the signal.
3) Utilize the singular spectrum analysis method to filter noise components and enhance the nonlinear components in the reconstructed signal.
4) Utilize adaptive linear prediction filtering technology to enhance the characteristic frequency and improve the frequency domain resolution.
5) Utilize envelope demodulation to extract the weak modulation components in the signal. Through envelope spectrum analysis, extract the modulation characteristic frequency.
Experimental Description
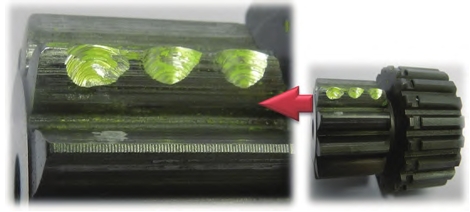
The experimental signals are collected on the integrated test bench of the planetary gearbox shown. The test bench consists of a three-phase drive motor, a two-stage fixed shaft gearbox, a planetary gearbox, and a load motor. The rated power of the drive motor is 11 kW and the rated speed is 1500 r/min. The first stage of the fixed shaft gearbox is decelerated and the second stage is accelerated, with contact ratios of 1.45 and 1.469, respectively. The input and output shafts of the planetary gearbox are connected to the fixed shaft gearbox and load motor through flexible couplings. The main components include a sun gear, three planetary gears, and a fixed inner gear ring. The number of teeth and actual operating frequency characteristics of each component are shown in Table 1. The initial failure of the planetary gearbox is simulated by drilling holes on the top of the sun gear teeth. The failure characteristic frequencies of each component of the planetary gearbox, where N is the number of planetary gears.
Feature extraction
The test condition is that the set speed of the drive motor is 600r/min and the load is 0N·m. The vibration signal is collected by the YE6232B signal acquisition instrument with a sampling frequency of 71428Hz and a sampling length of 300000 points. The vibration signal waveform of the pitting corrosion at the top of the sun gear tooth of the planetary gearbox is shown in the figure. From the time domain waveform of the signal, it can be seen that the fault characteristics have been overwhelmed by noise. The frequency domain waveform of the signal only shows that only the 3rd harmonic of the planet carrier rotation frequency is prominent, which is caused by the passing effect of the vibration signal of the planetary gearbox. The meshing frequency and the rotation frequency of the sun gear are both overwhelmed by noise. It can be seen that it is difficult to extract fault characteristics directly from the time domain and frequency domain waveforms of the planetary gearbox. In order to extract the characteristics of the initial stage of the sun gear fault in the planetary gearbox, firstly, EEMD decomposes the collected vibration signal of the initial stage of the sun gear fault. The first few modes of EEMD contain most of the useful information in the signal, and this article only shows the first six eigenmode functions of the signal EEMD. It can be seen from the figure that each mode is still affected by noise and it is difficult to extract fault characteristics. The spectral aliasing of the eigenmode functions obtained by EEMD still exists. If a single eigenmode function is analyzed, false frequency peaks may cause feature extraction failure. In order to extract useful fault information, according to the kurtosis index, select a mode function that is relatively less affected by noise for signal reconstruction. Then, establish a trajectory matrix for the reconstructed signal. Perform singular value decomposition on the trajectory matrix and sort the obtained singular values from large to small. The large singular spectrum and its corresponding eigenvector account for most of the energy of the entire matrix and are used for signal reconstruction. The small singular spectrum, due to its small total energy, is discarded as noise. In the reconstructed signal, weak periodic components are enhanced due to their correlation components.
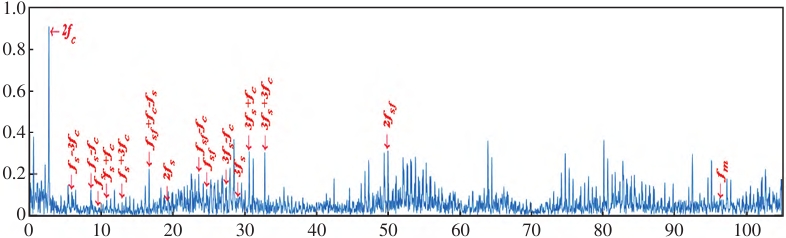
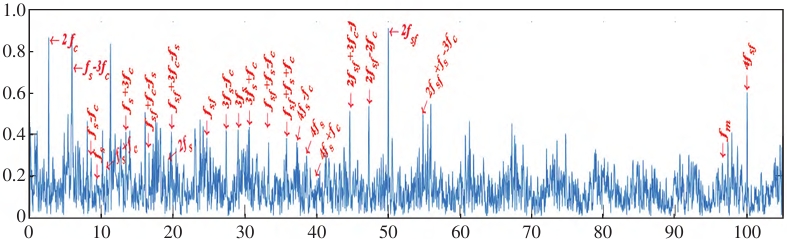
In order to improve the resolution of feature extraction in the early stage of planetary gearbox sun gear failure, the EEMD-SSA-ALPF method is used to process the test signal. By performing EEMD-SSA processing on the collected vibration signal, the linear correlation of the modulated components in the signal is enhanced. Adaptive
The essence of linear prediction filtering technology is narrowband filtering, so the linear correlation of modulation components in the signal is further improved. After adaptive line After the application of the sex prediction filter, the weak impact components in the signal are enhanced and identified, which increases the peak value of the characteristic spectral line and weakens the frequency domain caused by noise It can be seen that the EEMD-SSA method can extract some features from the signal. However, the peaks of these feature spectra are not prominent enough to be submerged in the frequency domain, indicating that there is still noise affecting the fault characteristics in the signal after EEMD-SSA processing. It can be seen that the solar wheel of the planetary gearbox has prominent frequency doubling and multiple sidebands, which suggests that there may be shaft misalignment in the solar wheel. The fault characteristic frequency and its frequency doubling amplitude of the solar wheel are prominent and have multiple sidebands, which can be used to infer that the solar wheel may have pitting corrosion, broken teeth, or crack faults.
In order to test the online monitoring performance of the proposed method, this article analyzed the sensitivity of the signal acquisition length. The relative dispersion characteristics of the band energy mean value were used as the fault feature display degree. After repeated experiments, the final results are shown in Figure 6. It can be seen that under this condition, when the sampling duration is less than 3 seconds, the fault features are easily overwhelmed by noise; when the sampling duration is less than 10 seconds, the fault features can be detected, but the feature values are relatively weak; when the sampling duration exceeds 11 seconds, the fault features can be clearly displayed in the frequency domain. In summary, the proposed method requires at least 4 seconds of sampling duration for fault monitoring of the planetary gearbox under this condition; when the sampling duration exceeds 11 seconds, the fault feature frequency can be clearly displayed.
conclusion
Through experimental analysis, it is verified that this method has strong recognition ability for weak fault characteristics in the vibration signal of the planetary gearbox at the early stage of fault. 1) Using kurtosis as an indicator for EEMD signal reconstruction maximizes the inclusion of fault information in the reconstructed signal, avoiding the filtering out of weak fault characteristics as noise; 2) The adaptive linear prediction filter is used to denoise the signals after aggregated empirical mode decomposition and singular spectrum analysis, further enhancing the nonlinear modulation components in the signal; 3) Compared with traditional EEMD-SSA methods, the proposed method can more effectively improve the signal-to-noise ratio of planetary gearbox faults at the early stage and extract weak feature information.