
According to the function of the mechanism in the seedling picking cycle, the whole movement is divided into four processes: seedling picking, seedling transplanting, seedling releasing and recovery, and the corresponding mechanism trajectory is also divided into four segments. The trajectory curve is fitted with cubic non-uniform B-spline curve. The more type value points given in each trajectory segment, the more flexible the control of the curve and the corresponding difficulty of optimization. Therefore, no less than 3 type value points are set in each segment, and 6 points are defined for the key seedling taking segment. The whole cycle trajectory is determined by 19 type value points Qi (I = 0,1,…, 18), and Qi (I = 0,1,2,3,4) defines the trajectory of seedling transfer segment, Qi (I = 5,6,7,8) defines the trajectory of seedling releasing section, Qi (I = 9,10,11) defines the trajectory of recovery section, and Qi (I = 12,13,…, 17) defines the trajectory of seedling taking section. Q0 and Q18 determine the highest position of the track, and Q6 determines the lowest position of the track. Since the parameters and motion law of the mechanism are determined by the given trajectory, on the basis of meeting the seedling taking and pushing trajectory, the attitude motion law of the seedling taking arm is changed by adjusting the trajectory of the seedling moving section to meet the working attitude requirements. The adjustment of the type value point of the seedling moving section is also determined according to its influence on the attitude target.
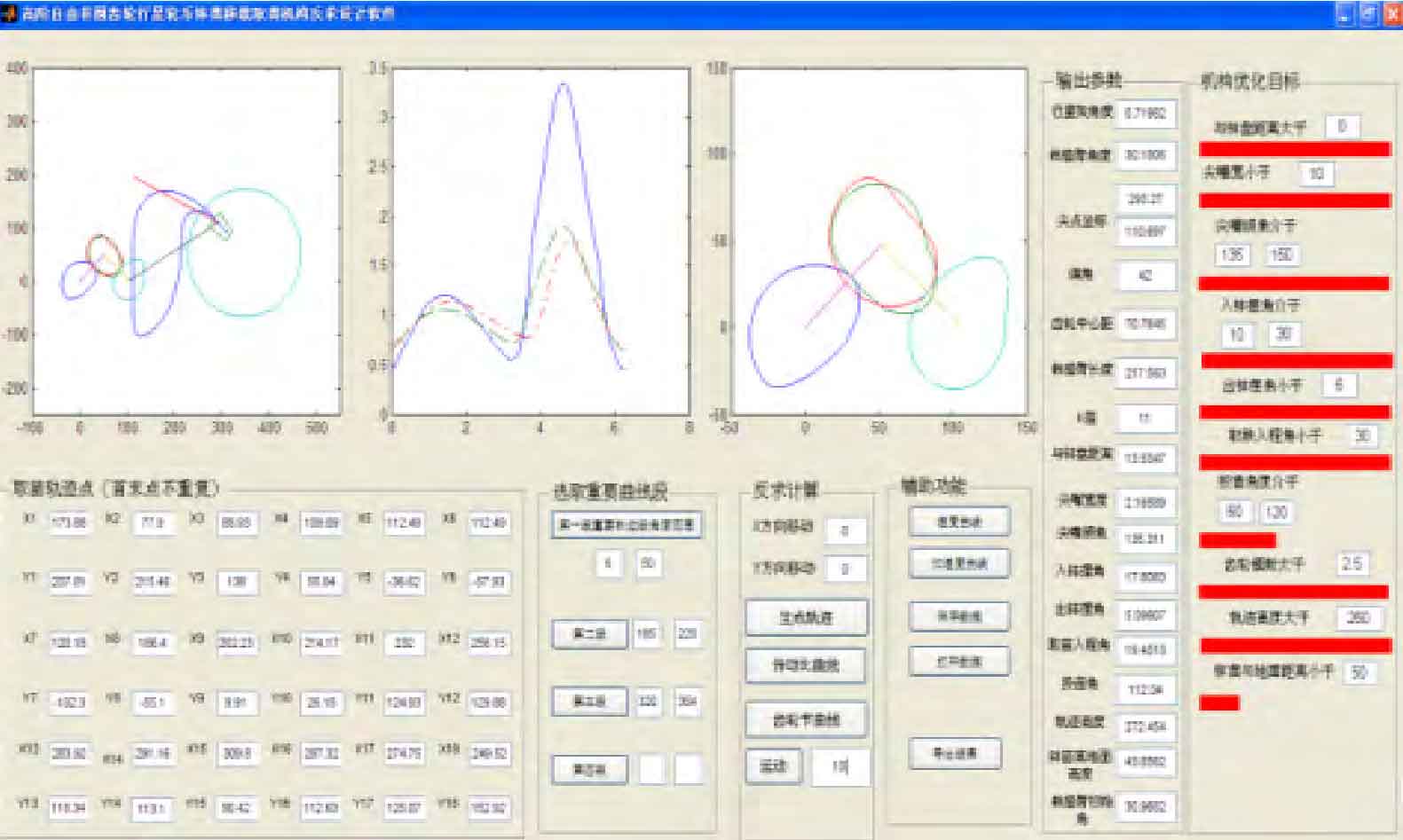
Based on the inverse mathematical model of the mechanism and the planning method of expected trajectory, the design software of seedling taking mechanism of free non-circular gear planetary gear train is compiled. As shown in Figure 1, figure 1 is the operation interface of the software. Through the software, 19 type value points of the expected trajectory are input, the transmission ratio parameters of the mechanism and the target value of seedling taking are obtained by the software, the advantages and disadvantages of the target are judged by the software calculation, and the motion simulation of the mechanism is realized. Through software analysis, the value points I and Q of seedling taking trajectory type are as follows:
(173.88,207.81)、(77.90,215.46)、(88.93,138.00)、(109.09,55.84)、(112.49,−36.62)、(112.49,−57.93)、(120.18,−102.30)、(186.40,−55.10)、(202.23,9.91)、(214.17,26.18)、(232,124.93)、(256.15,129.88)、(283.92,118.34)、(291.16,113.10)、 (309.8, 90.42), (287.32112.63), (274.75125.07), (249.52152.92), the effect diagram of the mechanism is shown in Figure 1. Analyze each working target of seedling taking. In this design, the minimum distance between the track and the bowl feeding device is 21 mm, the width of the seedling taking tip is 2.07 mm, the inclination angle of the tip is 136.4 °, the swing angle of the seedling taking arm in the bowl section is 24.3 °, and the swing angle of the bowl taking section is 3.6 °, The seedling throwing angle is 76 °, the gear module is 2.53 mm, the track height is 285 mm, and the distance between the bowl seedling and the lowest point of the planet carrier is 34 mm, which meets the requirements of seedling taking.
Using the design software of the mechanism, adjust the coordinates of point Qi (I = 6) to (123.18, − 112.30) to reduce the lowest point of the track by 10 mm. It is calculated that the maximum transmission ratio of two-stage non-circular gear transmission changes from 3.43 to 3.85, and the maximum transmission ratio of single-stage non-circular gear changes from 1.81 to 2.13. It can be seen that the lowest point of the track has a significant impact on the maximum transmission ratio of the mechanism, The planning of this point can provide conditions for the small amplitude design of gear transmission ratio.
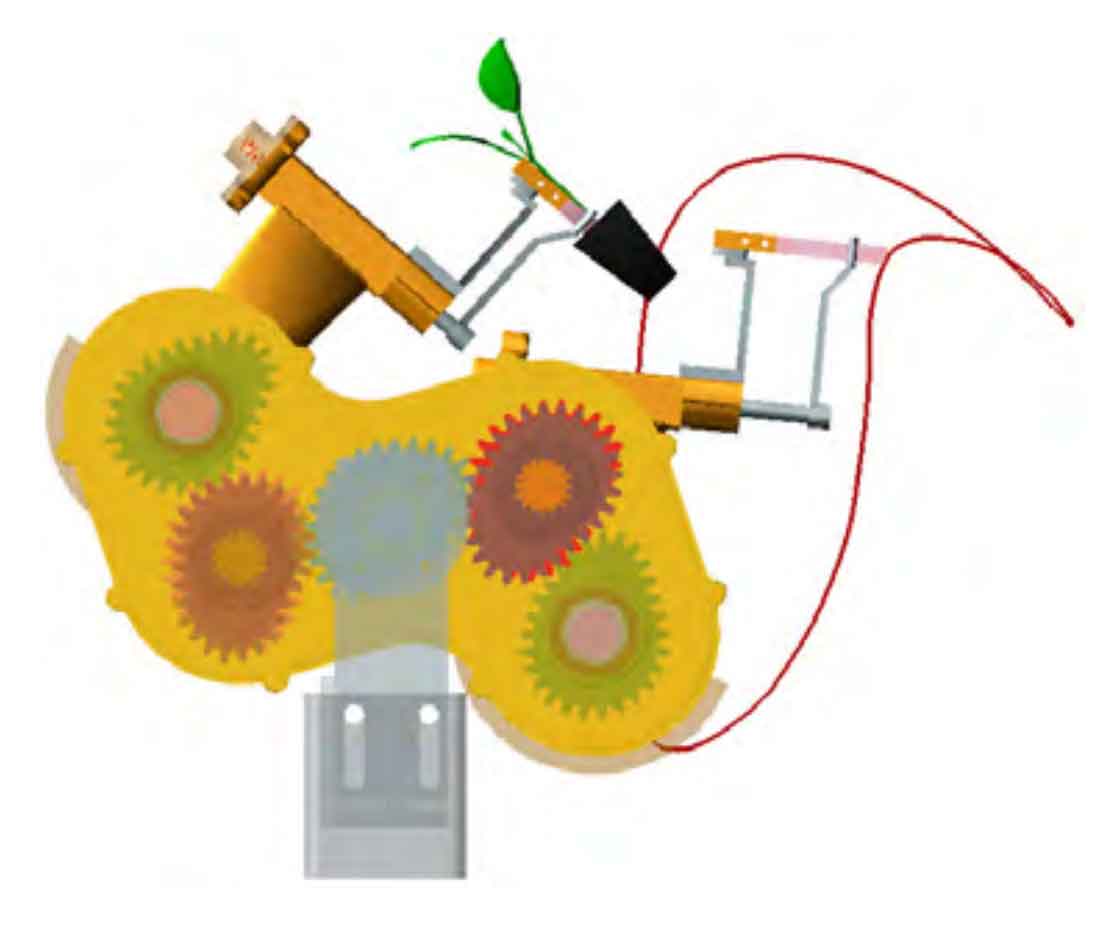
Based on the design parameters shown in Figure 1, the three-dimensional model of the double arm seedling taking mechanism is established, and the motion simulation is carried out in ADAMS software. As shown in Figure 2, the ADAMS simulation trajectory and attitude of the mechanism are consistent with the calculation results of the software, which proves the correctness of the mathematical model of the mechanism. The simulation test of the mechanism shows that this kind of transmission is an efficient transmission scheme. Compared with the mechanism scheme of multi rod slider or slide combination on the automatic dry land transplanter put into the market in Japan and South Korea, the efficiency is higher and the transmission is more stable.