
Harmonic gear drive is widely used in aerospace, robotics, CNC machine tools, light industrial machinery, food machinery and other automatic control systems
In the flexible bearing harmonic gear drive, the cam wave generator surface is severely worn. The author proposes a new type of wave generator for flexible bearing harmonic drive without flexible bearings Based on the design of the elliptical sliding bearing, the lubrication performance is best when the elliptical clearance ratio is 3, which is obtained using computational fluid dynamics method. In this paper, further research is conducted on the parameter design of the bionic anti-friction structure on the cam surface. In recent decades, some animals and plants in nature can adapt to the complex and changing living environment by utilizing their own non-smooth surface micro-texture, as shown in Figure 1. With the deepening of the research on bionics, people use surface texture technology to improve the tribological properties of material surfaces, and it has been widely applied in fields such as bearings, cylinder liner-piston ring, sealing, mechanical hard disk, artificial joints, and road surface.
Analysis model
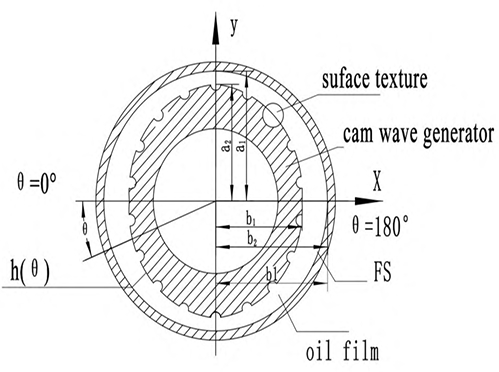
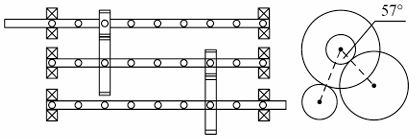
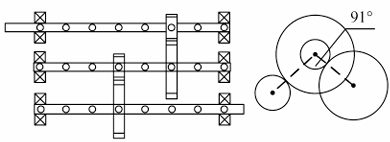
The fluid domain model between the cam wave generator and the flexspline is shown in the figure. The cam wave generator rotates counterclockwise at a speed of n1, and the direction of rotation of the flexspline is opposite to that of the cam wave generator. The outer wall of the cam wave generator and the inner wall of the flexspline are the boundaries of the oil film. The thickness h(θ) of the oil film varies from a maximum value hmax at a rotation angle θ=0 to a minimum value hmin at θ=90°. The width direction of the cam wave generator is the z axis, and the outer surface of the cam wave generator is designed with a micro-pit texture with a spherical cap shape at the bottom.
Conclusion
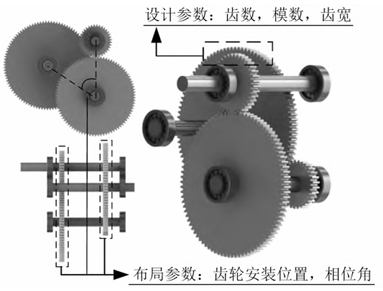
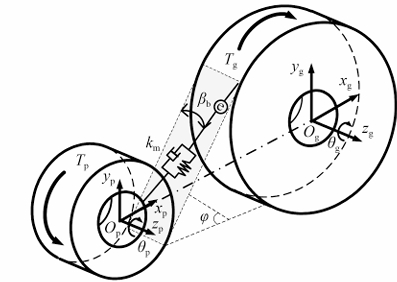
(1) Using the finite element method, a parametric dynamic model of a large-scale mining gear transmission system is established. The numerical solution set is obtained by solving the dynamic equations using the Newmark time-domain integration method, which reflects the mapping between design parameters, layout parameters, and dynamic responses. Based on this, an optimization model that simultaneously considers design parameters and layout parameters is established.
(2) Through the comparison of the dynamic numerical calculation results obtained from the optimized model and the original model, it is shown that the NSGA-II algorithm is very effective for the dynamic performance optimization design of large-scale mining gear transmission systems. After multi-objective optimization, the dynamic meshing forces of the two-stage gears are reduced by 7.6% and 15.7%, respectively, and the volume is reduced by 27. 0%。
(3) For large mining gear transmission systems, due to the significant impact of gearbox volume and structure on the performance of large mining gearboxes
For the design of mining transmission systems, the results of multi-objective optimization are more appropriate.